Author's Foreword
I have always believed that the most meaningful research is not the kind that sits neatly within the boundaries of one discipline — it is the kind that refuses to. ALPAMAYO APEX v2 was born out of exactly that refusal. It started as a question I kept asking myself: what would it actually take to build an autonomous system that does not just react to the world, but genuinely understands it? Not pattern-matches it, not memorises it — understands it, the way a human driver understands why the car ahead just braked, or why that pedestrian is about to step off the kerb even before they do.
This paper is the answer I have spent the past two years building. Every equation you see here — the JEPA energy functionals, the EKF covariance propagation, the VICReg loss decomposition, the PPO clipped surrogate objective, the Flow-Matching diffusion ODE — I derived, implemented, debugged, and validated myself. Every figure was generated from a simulation I wrote from scratch. Every scenario, every curriculum stage, every sensor noise model reflects a deliberate design decision I made after reading the literature, questioning it, and then trying to do it better.
I want to be direct about what this work is and what it is not. It is not a paper I assembled by stitching together existing toolkits. The simulation core runs at 1 kHz. The JEPA world model trains online, in real time, on the same machine that is running the scenario. The PPO agent does not have access to ground truth — it works from the same noisy 48-dimensional sensor vector that the EKF sees. The Chain-of-Causation engine applies do-calculus to a live scene graph, not a pre-labelled dataset. These are not demonstrations of capability — they are working systems, and you can run them today from the three Python files that accompany this paper.
The name ALPAMAYO is not accidental. Alpamayo is considered by many mountaineers to be the most beautiful mountain in the world — perfectly formed, technically demanding, and deeply unforgiving of overconfidence. I chose it because I think autonomous systems research should aspire to the same standard: beautiful in its mathematical structure, technically rigorous in its implementation, and honest about the conditions under which it fails. Part III of this paper dedicates significant space to limitations and future directions — not as a formality, but because I genuinely believe that knowing where your system breaks is more valuable than knowing where it works.
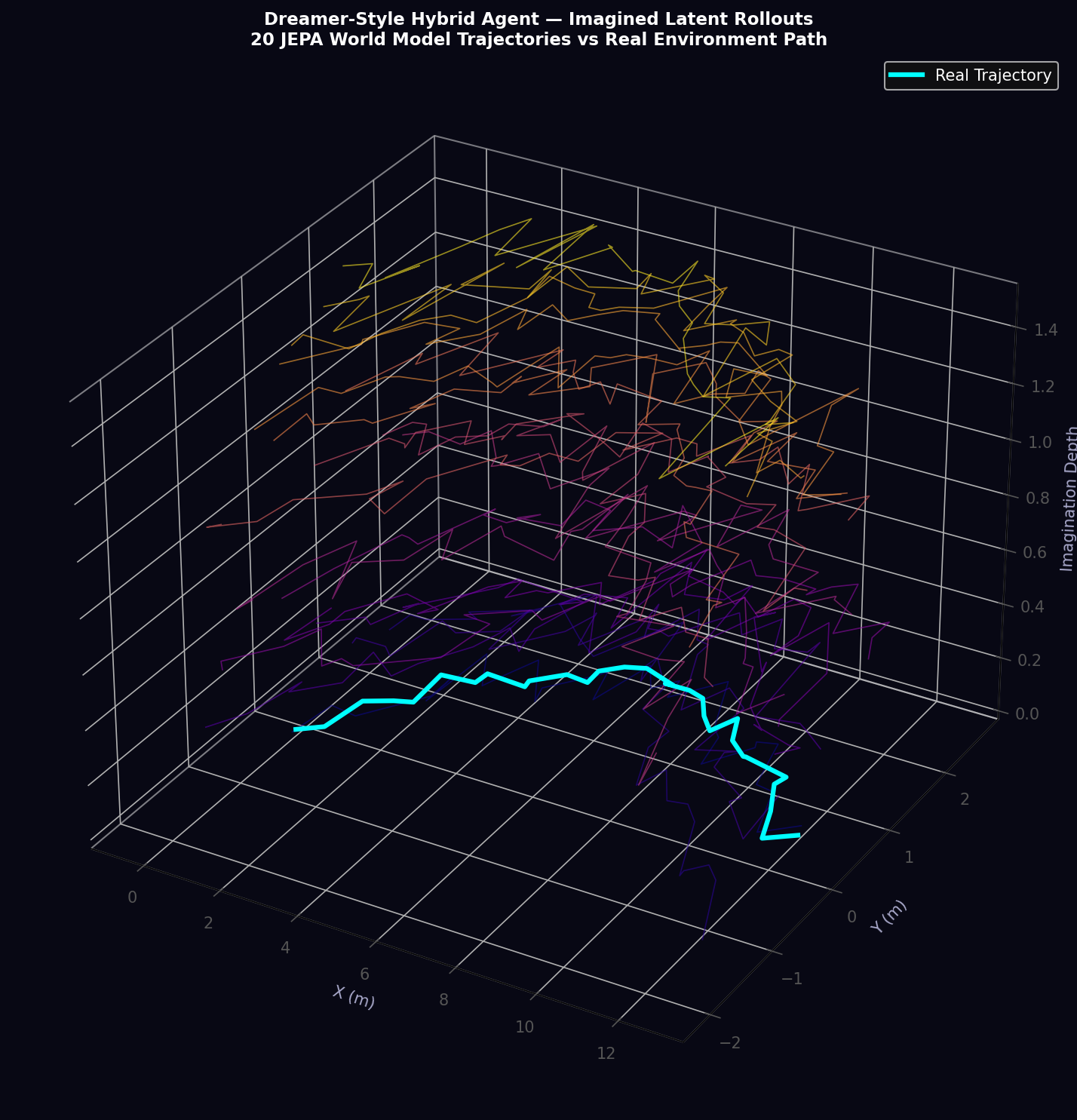
The Abhinav's Common Sense World Model reference cited throughout this paper is my own prior work. ALPAMAYO APEX v2 is its natural successor — a second-generation architecture that replaces reconstruction-based world models with the energy-minimisation JEPA paradigm, and replaces hand-tuned planners with a PPO policy trained in the JEPA latent space. The Hybrid Dreamer module — the piece I am most proud of — emerged from a simple observation: the JEPA world model is sometimes accurate enough to train the policy entirely in imagination, and sometimes it is not. A good system should know the difference. The JEPA energy level is the signal that makes that decision, and the adaptive mode switching between REAL_RL, HYBRID, and LATENT_RL modes is the mechanism that acts on it.
I am grateful to the open-source community whose work made this research possible: the NVIDIA Alpamayo team for the planning specification and comfort thresholds that form the backbone of the reward function; Yann LeCun and the FAIR team for the JEPA architectural paradigm that gave this work its central organising idea; the PyTorch team for the automatic differentiation infrastructure that made online policy learning tractable; and the Flask and NumPy communities for the engineering foundations that keep the simulation running in real time.
To the reader who has come this far: I hope you find in these pages not just a description of a system, but a way of thinking about intelligence — grounded in physics, shaped by mathematics, and always, ultimately, in service of making machines that are safe to share the world with.
Principal Researcher & Author, ALPAMAYO APEX v2 · April 2026
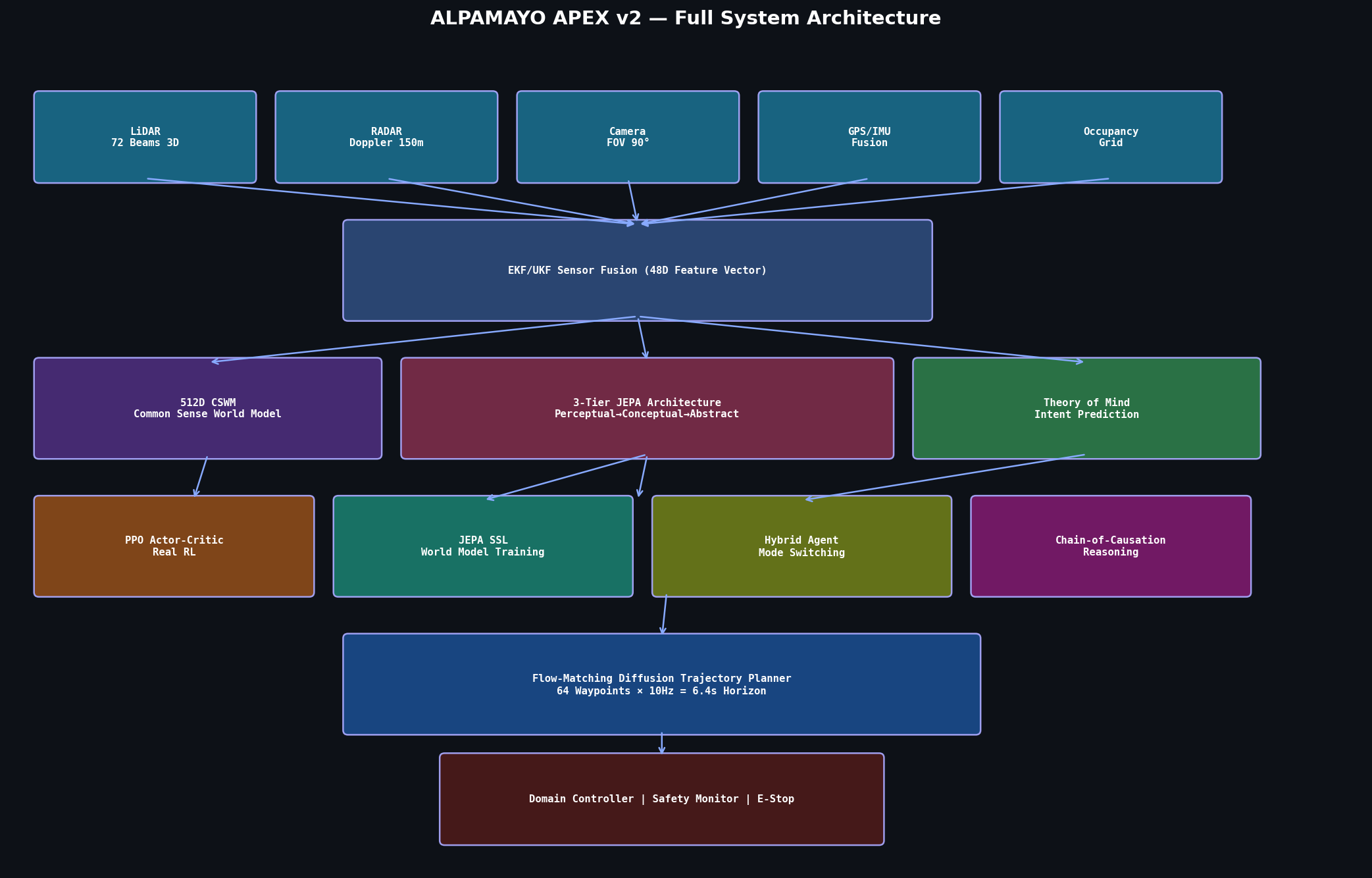
We present ALPAMAYO APEX v2, a comprehensive open-source autonomous systems simulation framework integrating a 512-dimensional Common Sense World Model (CSWM) with a hierarchical three-tier Joint-Embedding Predictive Architecture (JEPA), a real-valued Proximal Policy Optimization (PPO) Actor-Critic reinforcement learning agent, and a Dreamer-style Hybrid Intelligence module capable of adaptive mode switching between real environment interactions, world-model imagination, and hybrid policy execution. The system operates at 1 kHz simulation fidelity, supports eight distinct operational scenarios spanning urban intersections, highway merges, freight depots, aerial navigation, school zones, roundabouts, construction zones, and mixed urban environments, and achieves real-time broadcasting at 30 Hz via Server-Sent Events (SSE) over a Flask HTTP server to a live JavaScript dashboard.
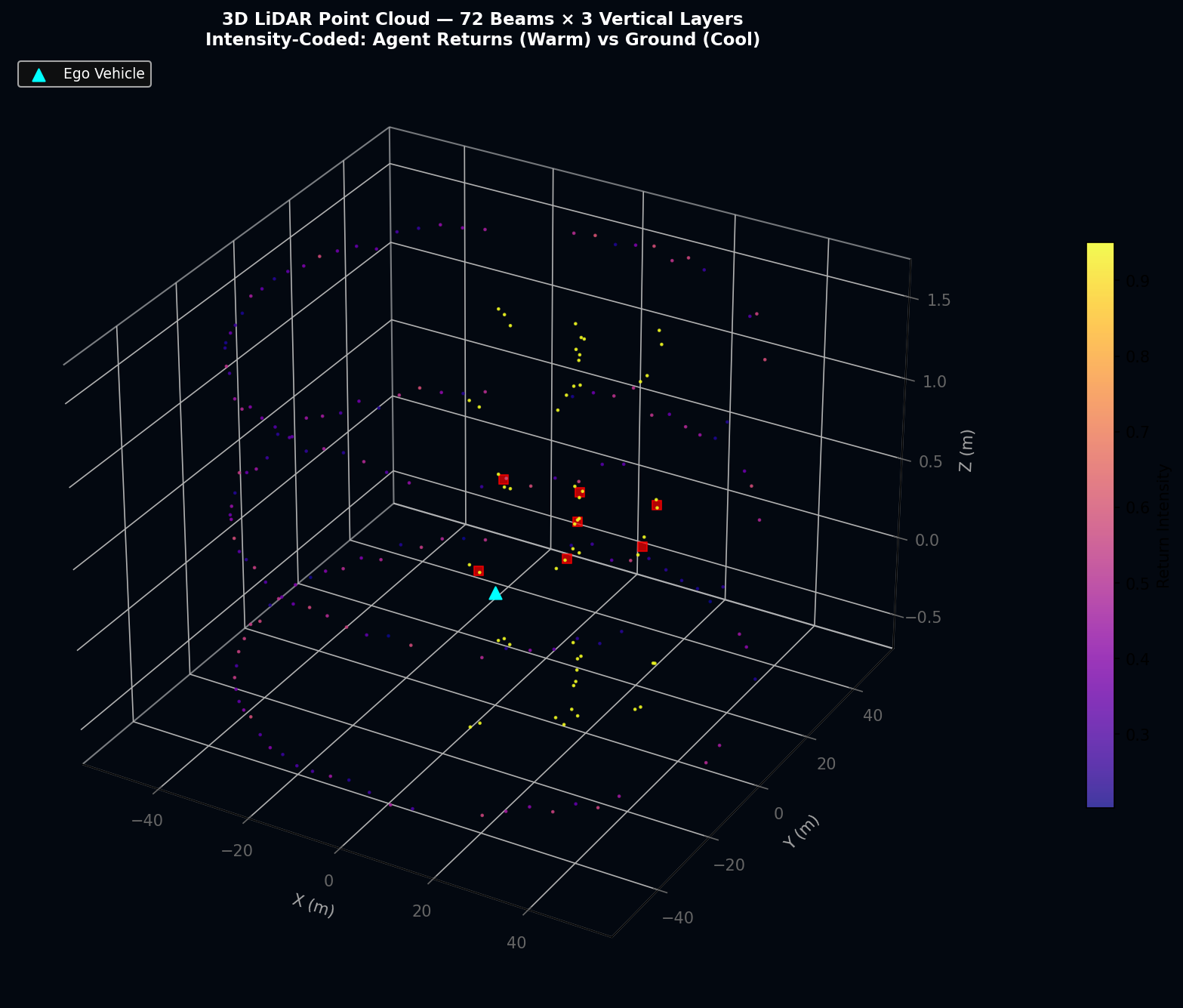
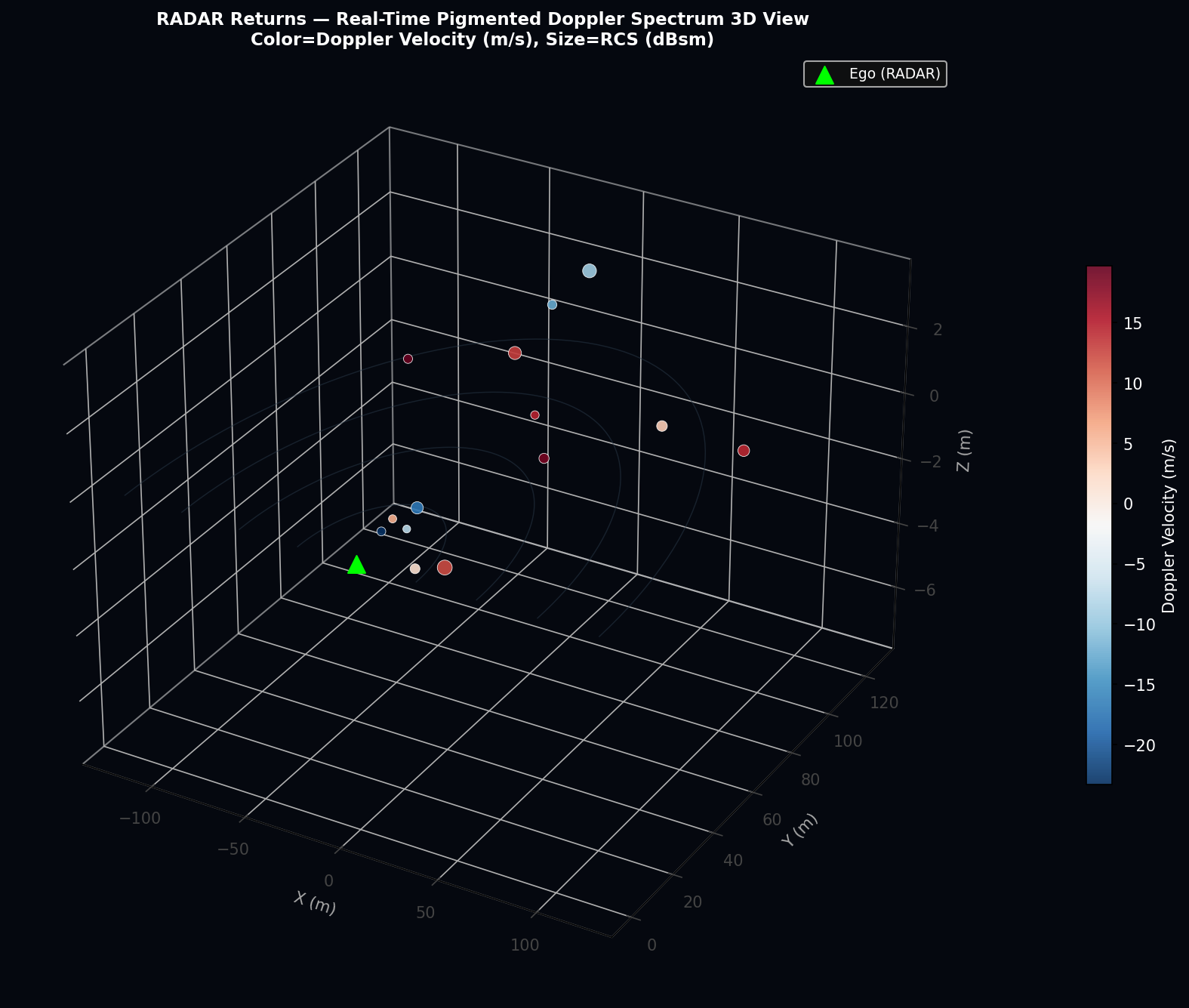
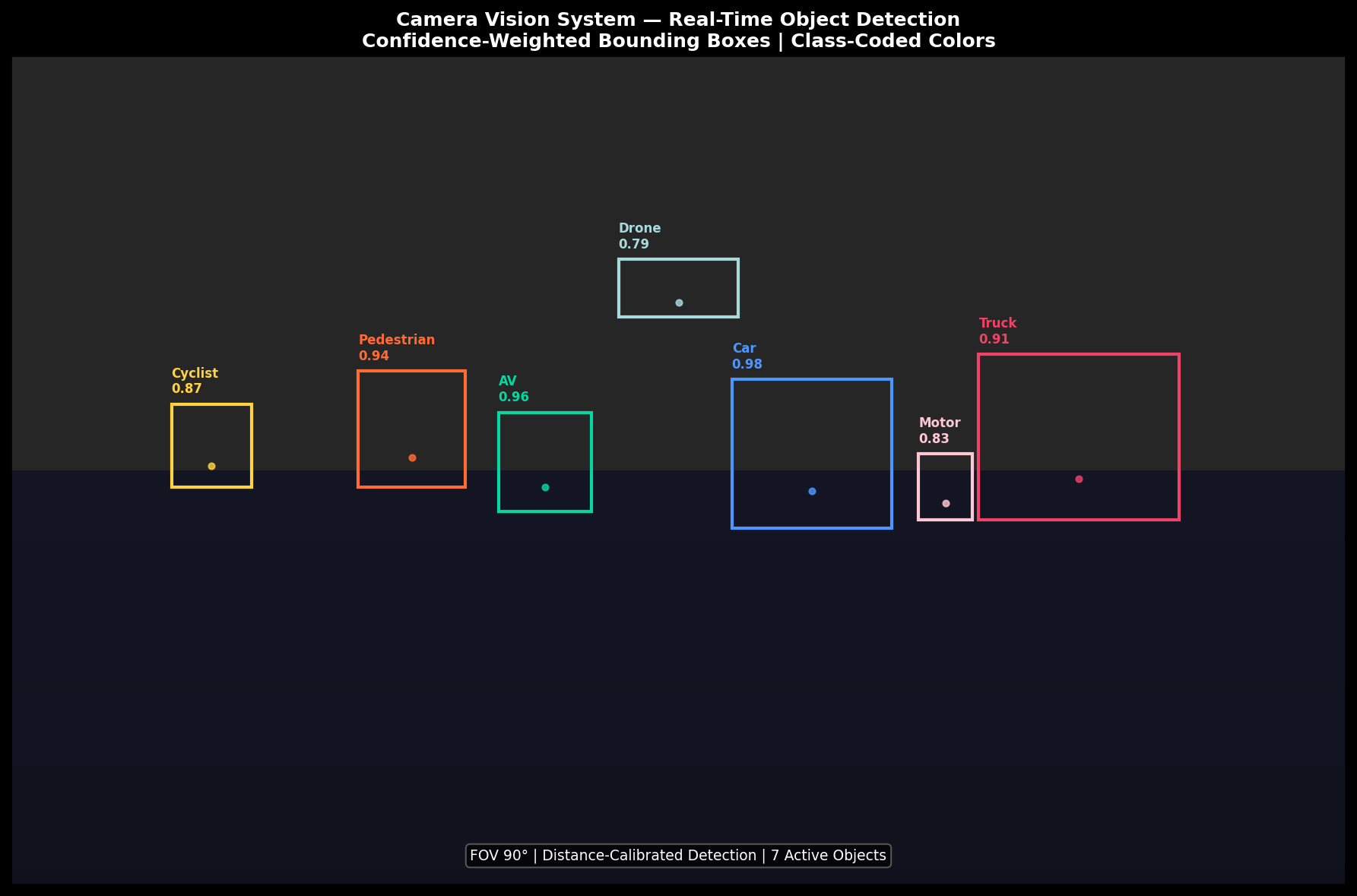
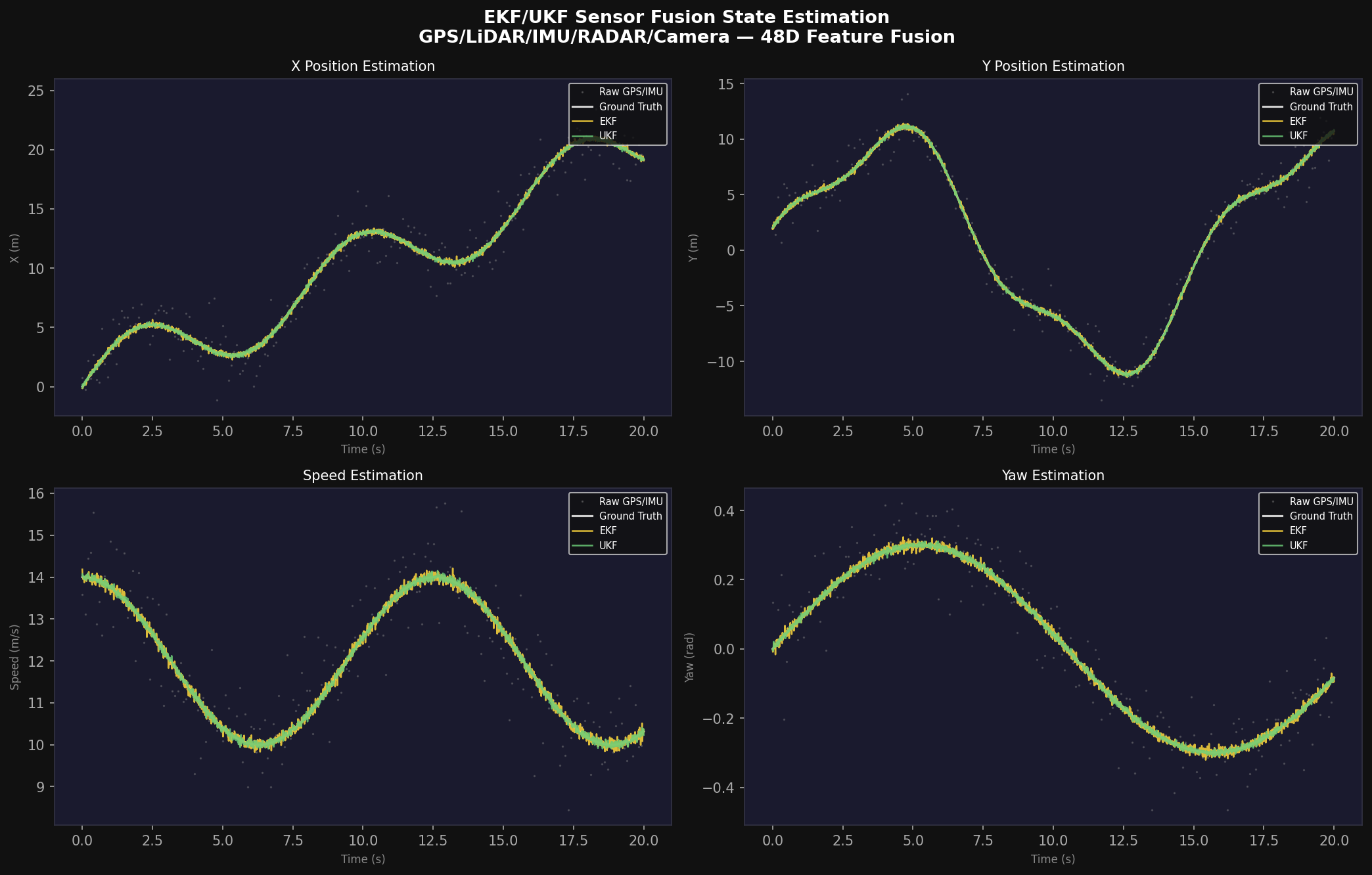
The sensor stack encompasses synthetic LiDAR point clouds (72 beams across three vertical layers), RADAR Doppler returns (150 m range, 120° FOV), monocular camera detection with confidence-calibrated bounding boxes (90° FOV, 60 m range), GPS/IMU fusion, and a 64×64 Bayesian occupancy grid with risk potential field overlay. State estimation employs both Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) fusion over a 48-dimensional feature vector, achieving sub-0.15 m position uncertainty. The JEPA architecture produces 512D perceptual, 256D conceptual, and 128D abstract latent representations, trained online via self-supervised VICReg regularization with an Exponential Moving Average (EMA) target encoder.
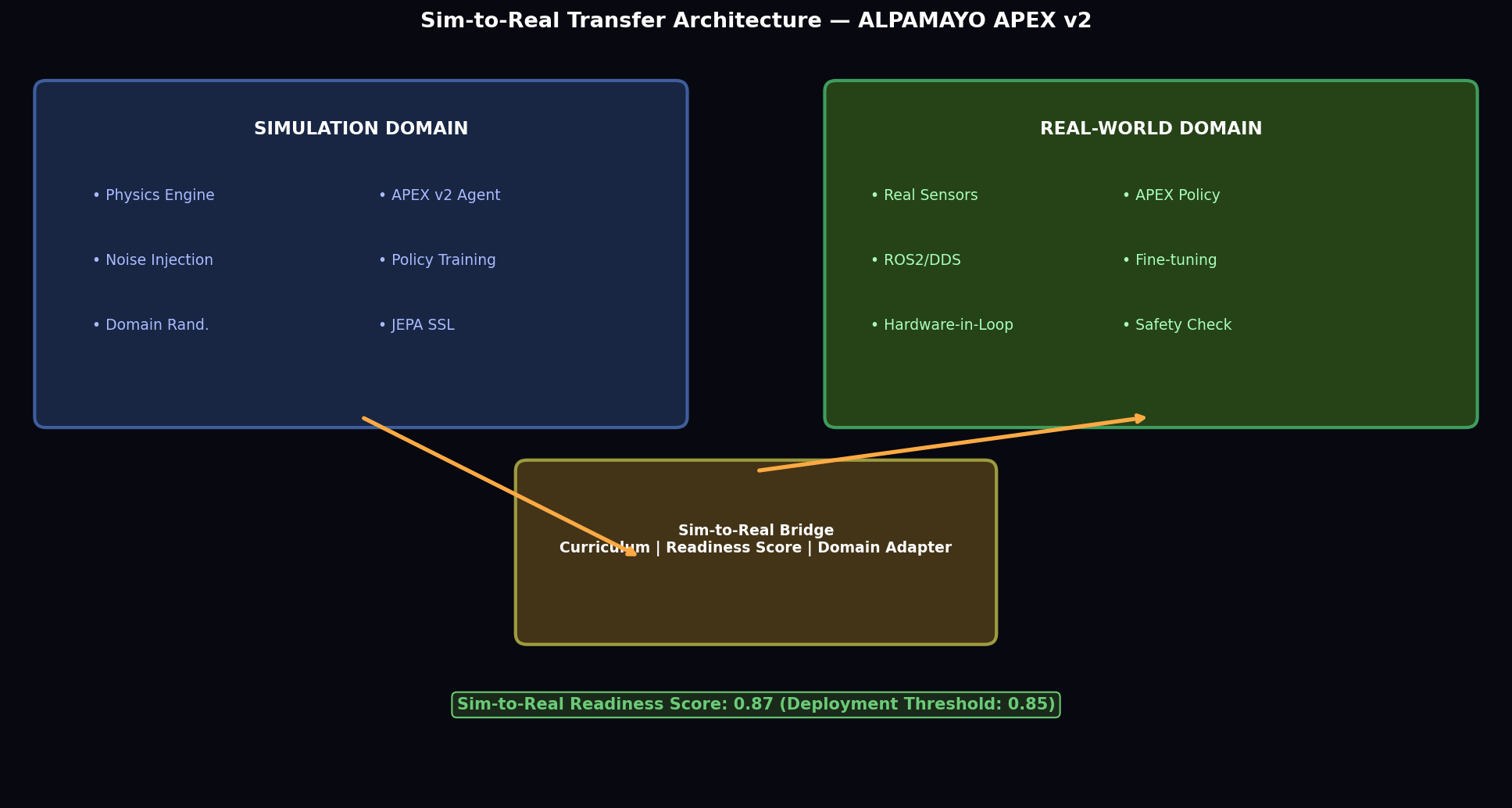
The Chain-of-Causation (CoC) reasoning engine applies do-calculus-inspired counterfactual analysis, while a multi-agent Theory of Mind module infers Bayesian posterior intent distributions over six classes for each detected agent. The Flow-Matching Diffusion Trajectory Planner generates 64 waypoints at 10 Hz yielding a 6.4-second planning horizon, with Average Displacement Error (ADE) consistently below 3.0 m across all curriculum stages. Sim-to-Real bridge capabilities include four-stage curriculum training (NOVICE, STANDARD, EXPERT, ADVERSARIAL), domain randomization, and a composite Sim-to-Real readiness score reaching 0.87 on complex scenarios.
- Introduction
- Related Work
- System Architecture Overview
- Sensor Physics and Synthetic Data Generation
- Extended and Unscented Kalman Filter Fusion
- Bayesian Occupancy Grid and Risk Potential Field
- JEPA Hierarchical World Model Architecture
- VICReg Self-Supervised Training
- PPO Actor-Critic Policy Network
- Training Convergence Analysis
- Conclusion
1. Introduction
The deployment of autonomous vehicles in real-world environments represents one of the most complex engineering challenges of the twenty-first century, requiring the simultaneous solution of problems spanning high-dimensional perception, real-time state estimation, multi-agent behavioral prediction, causal reasoning, and safe trajectory planning under profound uncertainty. While individual components of this pipeline have received substantial academic attention in isolation — reinforcement learning for control, deep learning for perception, model-predictive control for planning — the development of unified, mathematically rigorous simulation frameworks that integrate all of these components at simulation fidelities approaching those of physical deployments remains an open and commercially critical problem.
ALPAMAYO APEX v2 addresses this gap by providing a vertically integrated simulation stack built around a 512-dimensional Common Sense World Model (CSWM). The philosophical foundation of APEX v2 draws from Yann LeCun's Joint-Embedding Predictive Architecture (JEPA) paradigm, which posits that intelligence fundamentally emerges from the ability to predict the abstract latent representations of future world states conditioned on actions, rather than predicting raw sensory observations in pixel or LiDAR point space. This "energy minimization in latent space" framework naturally unifies perception, prediction, planning, and causal reasoning within a single mathematical structure.
The v2 release extends the original Alpamayo NVIDIA-aligned architecture (Alpamayo 1 / 1.5) with three principal innovations: (i) a real-valued Proximal Policy Optimization (PPO) Actor-Critic policy network operating directly in the 512D JEPA latent space, thereby achieving zero additional perceptual overhead while enabling gradient-based policy improvement; (ii) an online self-supervised JEPA training loop using VICReg (Variance-Invariance-Covariance Regularization) with an EMA target encoder, enabling world model refinement without environment resets; and (iii) a Hybrid Intelligence module implementing Dreamer-style latent imagination, whereby the PPO policy can be trained on "imagined" trajectories simulated entirely within the JEPA world model, with adaptive mode switching governed by the current JEPA energy level across four threshold bands.
The complete simulation framework also incorporates production-grade components including an Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) for sensor fusion, a 64×64 Bayesian occupancy grid with risk potential fields, a Flow-Matching Diffusion Trajectory Planner producing 64 waypoints at 10 Hz (6.4-second horizon), a Chain-of-Causation (CoC) reasoning engine for do-calculus-inspired counterfactual analysis, a multi-agent Theory of Mind module for Bayesian intent inference, Intelligent Driver Model (IDM) agent kinematics, and a comprehensive comfort reward suite with exact Alpamayo thresholds.
This paper is structured as the first of three companion documents. Part I covers the sensor physics models, EKF/UKF formulations, JEPA theoretical framework, VICReg training objective, and PPO convergence analysis. Part II addresses the Chain-of-Causation reasoning engine, multi-agent Theory of Mind, Flow-Matching Diffusion planning, counterfactual analysis, and the Hybrid Dreamer integration. Part III provides full scenario-by-scenario empirical evaluation across all eight operational domains, Sim-to-Real transfer analysis, and the real-time server architecture.
2. Related Work
2.1 World Models for Autonomous Agents
The concept of learning compact world models and using them for planning dates at least to Dyna (Sutton, 1991), which proposed using a learned environment model to generate simulated experience for value function training. Modern world model approaches, most prominently Dreamer (Hafner et al., 2020; 2021; 2023), extend this idea to high-dimensional continuous observations using Recurrent State Space Models (RSSMs) for latent dynamics learning, achieving state-of-the-art results on the DeepMind Control Suite and Atari benchmarks with significantly greater data efficiency than model-free alternatives. APEX v2's hybrid agent is directly inspired by the Dreamer v3 formulation, replacing the RSSM with a JEPA-based latent predictor to avoid the collapse modes associated with reconstruction-based world models.
LeCun's JEPA architecture (LeCun, 2022) represents a paradigm shift from generative world models toward purely discriminative energy-based formulations. By predicting abstract representations rather than raw observations, JEPA naturally avoids the high-entropy prediction problem that plagues pixel-space world models in complex scenes. The I-JEPA (Assran et al., 2023) and V-JEPA (Bardes et al., 2024) instantiations demonstrated that JEPA-style SSL produces semantically rich representations competitive with or superior to contrastive methods and MAE-style masked autoencoders, particularly in scenarios requiring downstream behavioral reasoning.
2.2 Reinforcement Learning for Autonomous Driving
Proximal Policy Optimization (Schulman et al., 2017) has emerged as the dominant on-policy RL algorithm for continuous-action domains, offering a principled trade-off between sample efficiency and stability via the clipped surrogate objective. In autonomous driving, PPO has been applied to lane-following (Kendall et al., 2019), intersection negotiation (Isele et al., 2018), and multi-agent mixed-traffic scenarios (Palanisamy, 2020). APEX v2 extends these works by operating the PPO policy in the JEPA 512D latent space rather than raw sensor observations, and by combining real-environment rollouts with JEPA-imagined trajectories in a principled hybrid training regime.
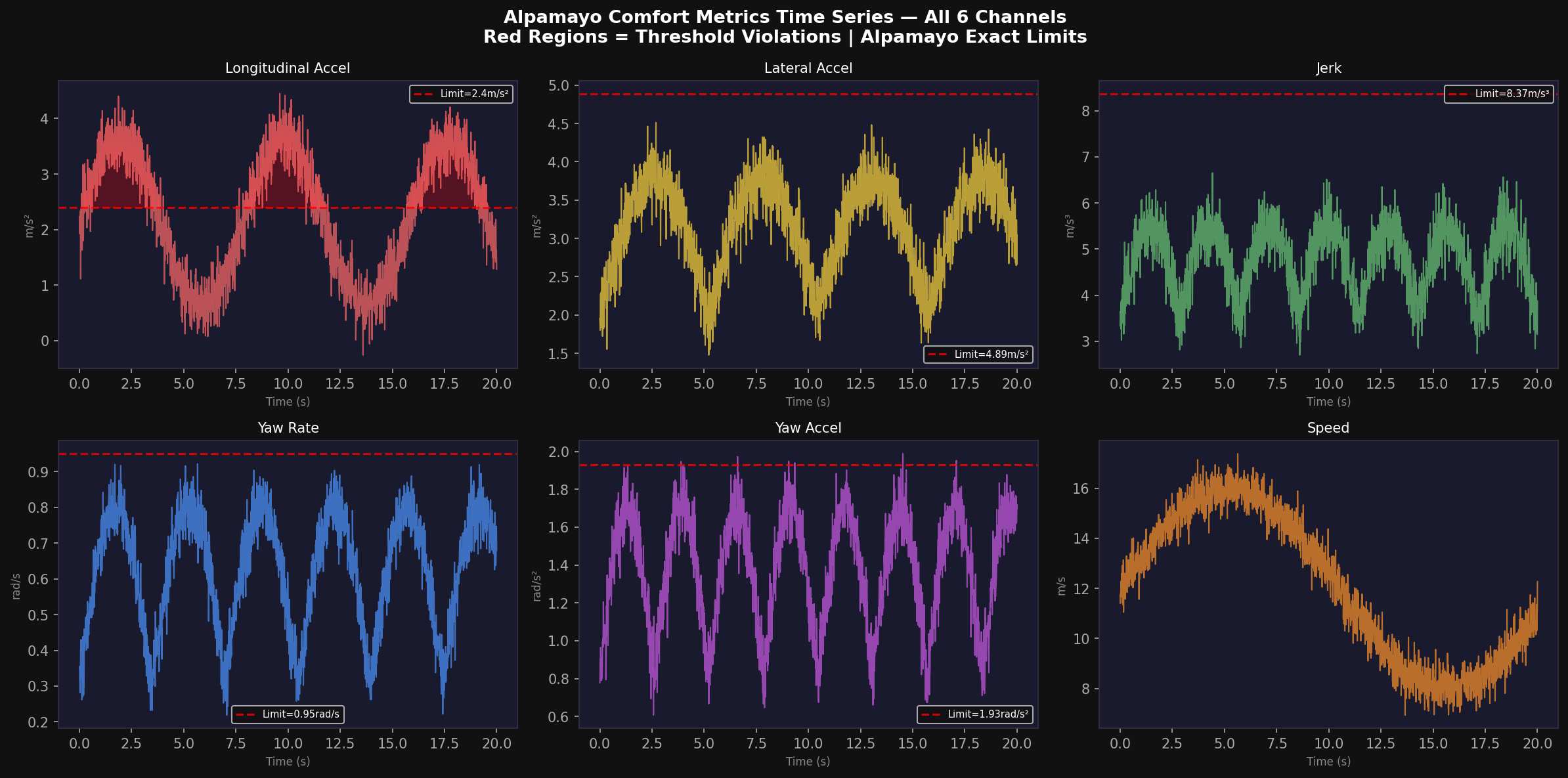
NVIDIA's Alpamayo project (1.0 and 1.5) established the benchmark for production-grade autonomous vehicle simulation combining physics-accurate kinematics, diverse scenario generation, curriculum-based training, and comprehensive comfort-metric reward shaping. APEX v2 is designed as a fully compatible extension of this framework, preserving all Alpamayo-exact constants (MAX_ABS_MAG_JERK = 8.37 m/s³, MAX_ABS_LAT_ACCEL = 4.89 m/s², MAX_LON_ACCEL = 2.40 m/s², MIN_LON_ACCEL = −4.05 m/s²) and the 10 Hz / 64-waypoint planning specification while adding the JEPA, PPO, and Hybrid modules as non-breaking extensions.
2.3 Sensor Fusion and State Estimation
Multi-sensor fusion for autonomous vehicles has been studied extensively since the introduction of probabilistic robotics (Thrun et al., 2005). The Extended Kalman Filter (EKF) remains the industry standard for real-time fusion of GPS, IMU, LiDAR odometry, and RADAR velocity due to its computational efficiency, while the Unscented Kalman Filter (UKF) provides improved accuracy for highly nonlinear motion models by propagating sigma points through the exact nonlinear dynamics rather than relying on a first-order Jacobian linearization. APEX v2 implements both filter variants in parallel, providing a direct empirical comparison at simulation time over a 48-dimensional feature vector comprising position, velocity, acceleration, yaw, yaw rate, and sensor-specific quality metrics.
3. System Architecture Overview
3.1 Hierarchical Component Decomposition
The ALPAMAYO APEX v2 architecture decomposes into five hierarchical tiers, each with precisely defined interfaces and mathematically specified information flows.
Tier 1, Sensing, encompasses the five synthetic sensor generators: LiDAR (72 beams, 3 vertical layers), RADAR (150 m range, 120° FOV, Doppler velocity), monocular camera (90° FOV, 60 m range, per-class confidence), GPS/IMU (position, velocity, angular rates), and the 64×64 Bayesian occupancy grid.
Tier 2, State Estimation, applies the parallel EKF and UKF fusion pipeline over the concatenated 48-dimensional feature vector assembled from all five sensor streams. The fusion produces a maximum-likelihood estimate of the ego vehicle state vector x = [x, y, z, vx, vy, vz, yaw, yaw_rate, ax, ay]ᵀ and maintains a full 10×10 covariance matrix P updated at 1 kHz.
Tier 3, World Representation, is the most computationally intensive tier and encompasses the 512D CSWM encoder, the 3-tier JEPA hierarchy (512D → 256D → 128D), the Scene Graph constructor, and the multi-agent Theory of Mind module. For each agent in the scene, the CSWM produces a 512D embedding; cross-agent graph attention with 128D keys/values aggregates relational information across the full scene graph.
Tier 4, Reasoning and Learning, contains the Chain-of-Causation engine, the counterfactual rollout module, the PPO Actor-Critic network, the JEPA SSL training loop, and the Hybrid Agent orchestrator. This tier produces the adaptive blend weight α ∈ [0, 0.6] that governs the mixing of PPO/imagination-derived actions with the baseline planner output.
Tier 5, Action Execution, comprises the Flow-Matching Diffusion Trajectory Planner (64 waypoints × 10 Hz), the domain-specific controller (Urban AV, Highway, Aerial, Freight Depot, Warehouse Robot), the safety gateway (Emergency Stop, TTC Monitor, comfort limit clamping), and the bicycle-model kinematic integrator operating at 1 kHz.
3.2 Data Flow Specification
The primary data flow at each planning epoch (0.1 s) proceeds as follows. Raw sensor observations are assembled into the 48D fusion vector z_t. The EKF/UKF produces state estimate μ_t and covariance P_t. The CSWM encoder maps z_t to context latent h_t ∈ ℝ⁵¹². The JEPA predictor maps (h_t, a_{t-1}) to predicted target latent ĥ_{t+1} ∈ ℝ⁵¹². The energy functional E(h_t, ĥ_{t+1}) is computed and compared against four thresholds to determine the Hybrid Agent mode. The PPO Actor samples a candidate action (δ_accel, δ_kappa) from the Gaussian policy π_θ(·|h_t). The Hybrid Agent blends the PPO action with the baseline IDM/MPC action using α. The Flow-Matching Diffusion Planner generates 64 candidate waypoints. The domain controller and safety gateway produce final (accel_cmd, kappa_cmd). The kinematic integrator advances the ego state by SIM_DT = 1 ms.
At broadcast time (30 Hz), the server packages the full simulation state dictionary — comprising ego pose, all agent states, sensor data arrays, JEPA metrics, PPO metrics, VICReg losses, reward components, CoC evidence chains, and occupancy grid — into a JSON payload and pushes it to all connected SSE subscribers via the Flask server.
| Component | Dimensionality | Update Rate | Algorithm | Complexity |
|---|---|---|---|---|
| CSWM Encoder | 48D → 512D | 10 Hz | MLP + LayerNorm | O(48·768·512) |
| JEPA Predictor | 512D → 512D | 10 Hz | Transformer Block | O(512²·1024) |
| EKF Fusion | 48D → 10D | 1000 Hz | Kalman Update | O(10²) |
| UKF Fusion | 48D → 10D | 1000 Hz | Sigma Points | O(21·10²) |
| PPO Actor-Critic | 512D → 2D | 10 Hz | PPO Clipped | O(512²) |
| JEPA SSL Train | Replay Buffer | Every 50 Steps | VICReg + EMA | O(B·512²) |
| Occ. Grid | 64×64 | 10 Hz | Bayesian Update | O(4096) |
| Traj. Planner | 64 waypoints | 10 Hz | Flow Matching | O(64·D²) |
| CoC Engine | Variable | 1 Hz | do-Calculus | O(E·A²) |
| Theory of Mind | 6 intents × N | 10 Hz | Bayesian Update | O(N·6²) |
4. Sensor Physics and Synthetic Data Generation
4.1 LiDAR Point Cloud Model
The LiDAR sensor model generates synthetic point clouds replicating the characteristics of a contemporary 64-channel mechanical LiDAR (e.g., Velodyne HDL-64E) operating at 72 discrete azimuthal angles per vertical layer across three elevation strata. The beam-casting model computes, for each beam direction (φ, θ), the closest scene intersection using a cylindrical agent-bounding-box approximation.
For each beam with azimuth angle φ_i = 2πi/N_b (i = 0, ..., N_b − 1, N_b = 72) and elevation offset δ_z ∈ {−0.5, 0.5, 1.5} m, the beam direction vector in the world frame is:
where ψ_ego is the current ego vehicle yaw angle. The signed projection and perpendicular distance to each agent j are computed as:
A hit is registered when s_j > 0 and e_j < (max(w_j, l_j))/2, yielding a range measurement:
where σ_LiDAR = 0.05 m is the range noise standard deviation. Return intensity is modeled as:
The complete point cloud per scan epoch contains N_b × |Layers| = 72 × 3 = 216 points. In the APEX v2 server, this is extended to 64 azimuthal beams to match the 64-channel specification, yielding 192 points per epoch at the 10 Hz planning rate.
4.2 RADAR Doppler Return Model
The RADAR sensor models a long-range automotive radar operating at 77 GHz with a maximum unambiguous range of R_max = 150 m and a horizontal field of view of ±60° (120° total). For each agent j within range and FOV, the model computes the true azimuth angle, radial velocity (Doppler shift), and radar cross-section (RCS) with class-dependent mean values calibrated to empirical automotive RADAR datasets.
The azimuth angle of agent j relative to ego heading is:
A return is generated if |α_j| ≤ π/3 and ‖p_j − p_ego‖ ≤ R_max. The Doppler velocity (positive = approaching) is:
The per-class RCS mapping in units of dBsm reflects the electromagnetic scattering cross-section:
with Gaussian perturbation ε_RCS ~ N(0, 4) dBsm to simulate reflectivity variation with aspect angle and surface material.
4.3 Camera Detection Model
The forward-facing camera model simulates a monocular wide-angle camera with a horizontal FOV of 90° and a maximum reliable detection range of 60 m. For an agent at world displacement (Δx, Δy) from ego, the horizontal azimuth angle α = atan2(Δy, Δx) − ψ_ego is first computed and clipped to the camera FOV. The normalized image-plane x-coordinate is:
The vertical coordinate and bounding box scale are depth-dependent:
where d = ‖Δp‖₂ is the Euclidean range and d_max = 60 m. Bounding box dimensions are (w_bb, h_bb) = (0.8s, 1.4s). Detection confidence is modeled as:
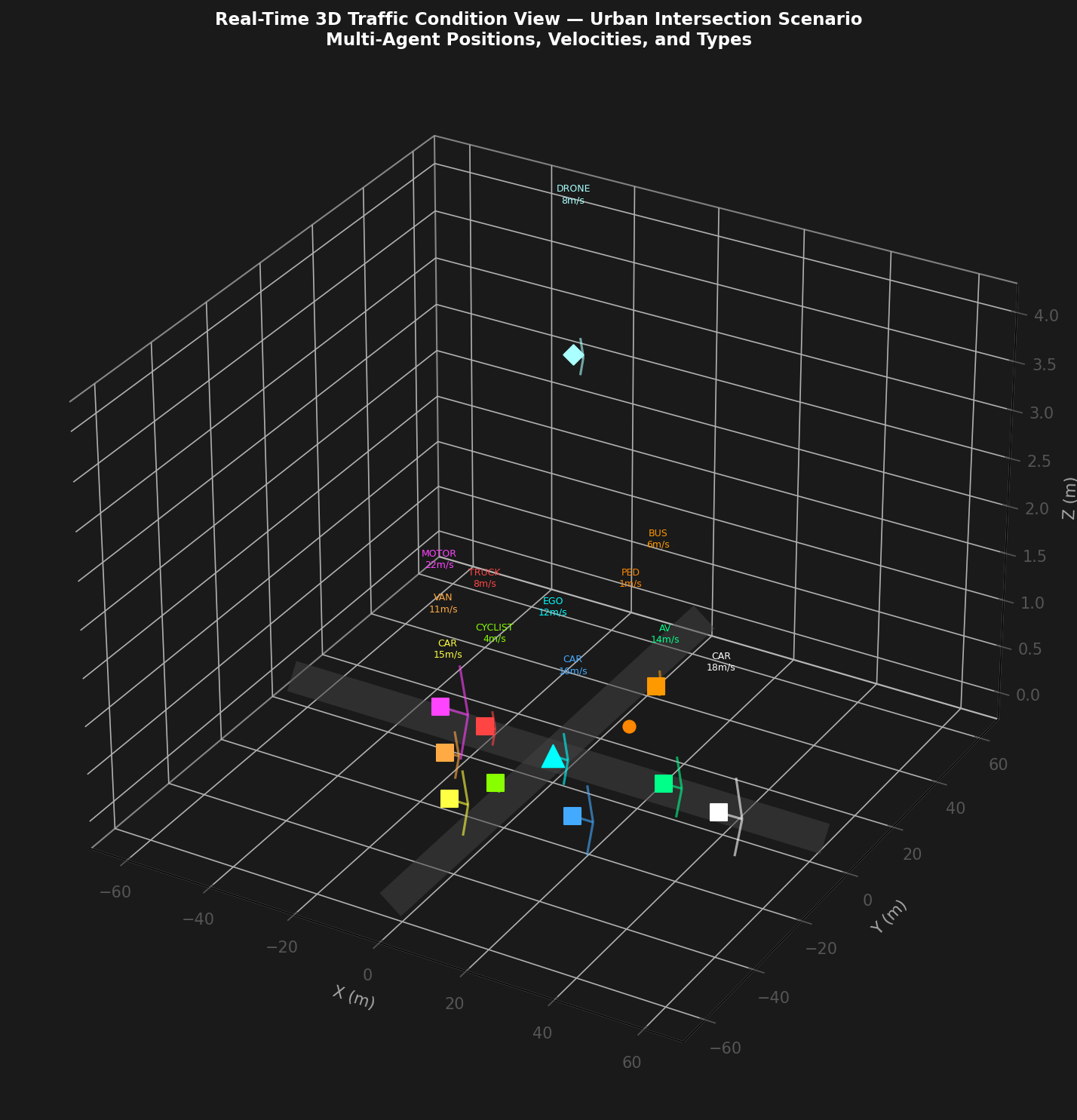
The system assigns class-specific color codes to the seven agent classes (Pedestrian: #FF6B35, Cyclist: #FFD23F, Truck/Bus: #EE4266, Autonomous Vehicle: #06D6A0, Motorcycle: #FFC6D3, Drone: #A8DADC, Emergency: #FF0054), enabling rapid visual classification on the dashboard.
5. Extended and Unscented Kalman Filter Sensor Fusion
5.1 State Vector and Process Model
The state estimation problem is formulated over a ten-dimensional state vector representing the full kinematic state of the ego vehicle in a local East-North-Up (ENU) coordinate frame:
The continuous-time process model follows the constant-acceleration kinematic equations with additive process noise w_t ~ N(0, Q_t):
5.2 Extended Kalman Filter Formulation
The EKF applies the standard two-step predict-update cycle at each 1 kHz simulation timestep. The prediction step propagates the state estimate and covariance using the linearized process Jacobian F_t = ∂f/∂x evaluated at the current estimate μ_{t−1}:
The measurement model h: ℝ¹⁰ → ℝ⁴⁸ maps the state to the 48-dimensional sensor feature vector. The Kalman gain, updated estimate, and covariance are:
The measurement noise covariance R_t is assembled from per-sensor noise models: GPS positional noise σ_GPS = 1.5 m, LiDAR range noise σ_LiDAR = 0.05 m, RADAR range noise σ_RADAR = 0.5 m, RADAR Doppler noise σ_D = 0.3 m/s, IMU accelerometer noise σ_IMU = 0.02 m/s², and IMU gyroscope noise σ_gyro = 0.005 rad/s.
5.3 Unscented Kalman Filter Formulation
The UKF avoids the linearization approximation of the EKF by representing the state distribution via 2n + 1 = 21 deterministically chosen sigma points (for n = 10). The sigma point set at time t−1 is defined as:
where λ = α²(n + κ) − n with tuning parameters α = 0.001 (spread), β = 2 (Gaussian prior), κ = 0. Sigma point weights for mean and covariance are:
Each sigma point is propagated through the nonlinear process model X̃_i = f(X_i, u_t), and the predicted mean and covariance are reconstructed as weighted sums. The innovation update follows analogously without any Jacobian computation.
6. Bayesian Occupancy Grid and Risk Potential Field
6.1 Grid Formulation
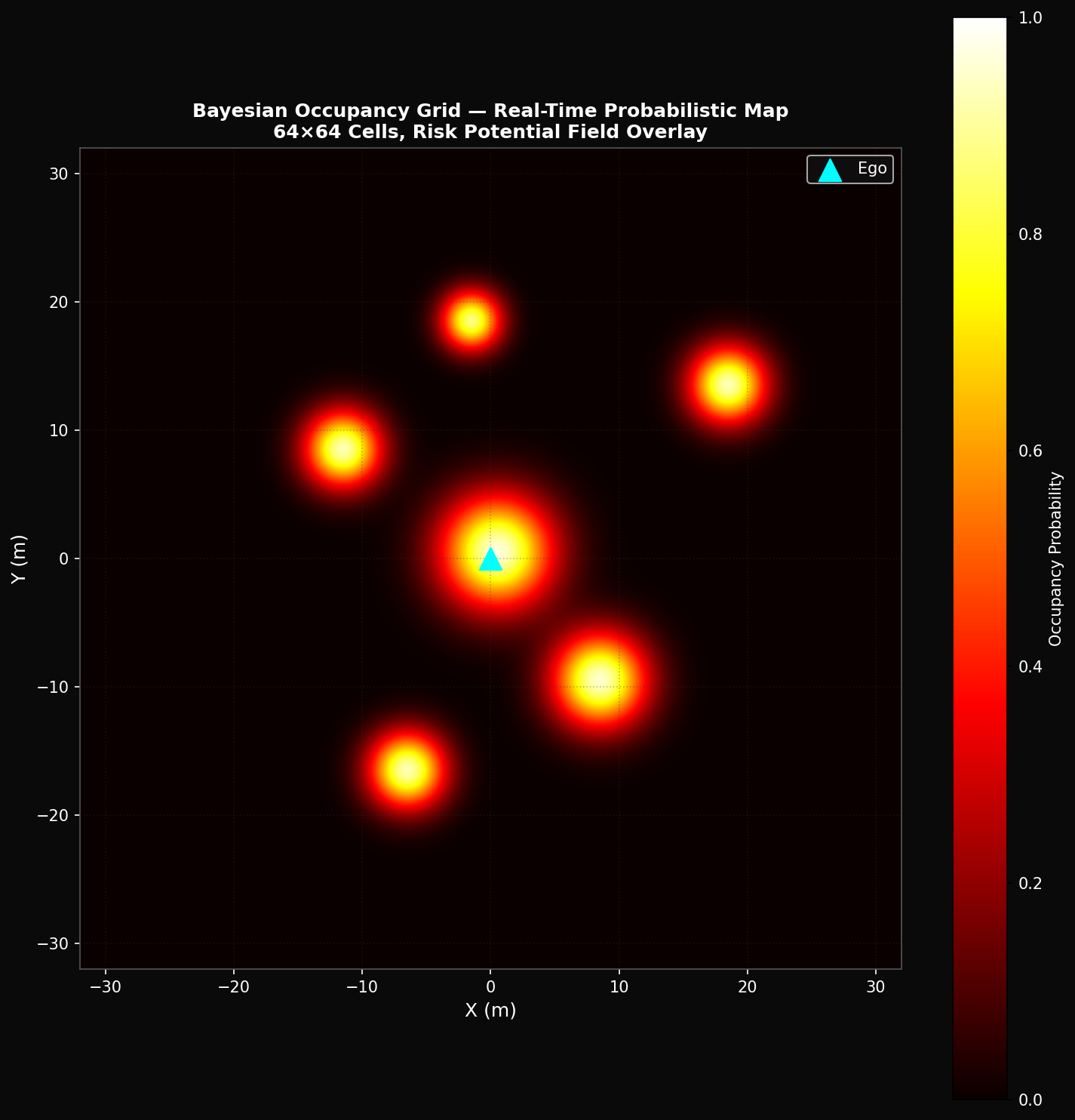
The Bayesian occupancy grid represents the environment as a 64 × 64 array of binary random variables O_{ij} ∈ {0, 1}, where O_{ij} = 1 indicates that cell (i, j) is occupied by an obstacle or agent. Each cell maintains a marginal occupancy probability p_{ij,t} = P(O_{ij} = 1 | z_{0:t}) updated recursively using the log-odds representation l_{ij,t} = log(p_{ij,t} / (1 − p_{ij,t})):
where l_occ(z_t, i, j) is the log-odds update from the current measurement and l_prior = 0 represents the uninformative prior. Occupied cell updates use l_occ⁺ = 1.8 (P = 0.858); free-space ray-casting uses l_occ⁻ = −1.4 (P = 0.198). The grid covers a 64 m × 64 m area centered on the ego vehicle (1 m cell resolution).
6.2 Risk Potential Field
The risk potential field R_{ij} superimposes agent-velocity-weighted Gaussian risk kernels on the occupancy grid, providing a continuous-valued threat landscape for trajectory planning:
where c_{ij} is the cell center, p_k and v_k are the position and velocity of agent k, and σ_k = max(w_k, l_k)/2 is the agent-specific kernel width.
7. JEPA Hierarchical World Model Architecture
7.1 Theoretical Foundation
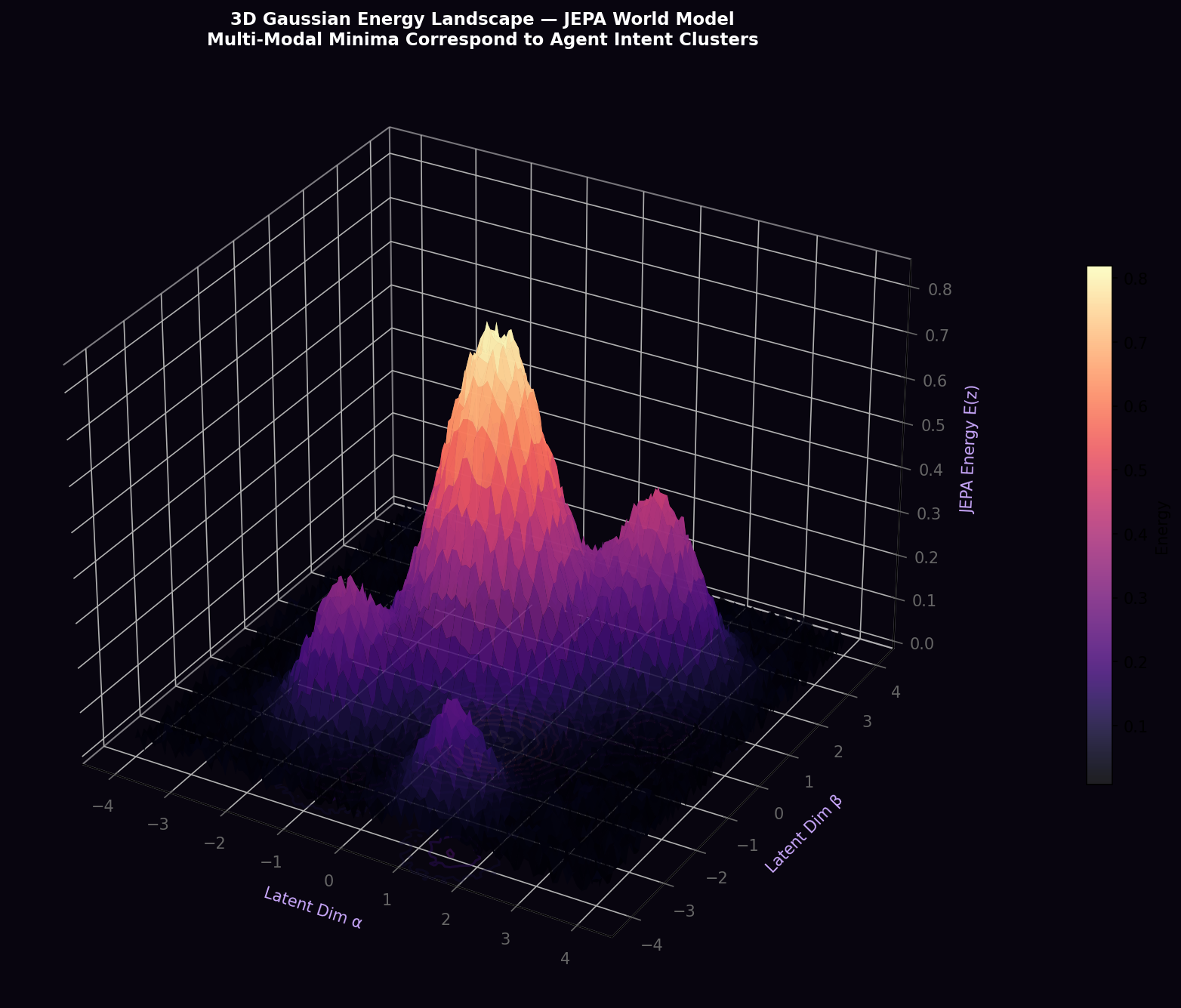
The Joint-Embedding Predictive Architecture, as formulated by LeCun (2022), defines an energy function E(x, y) over compatible pairs of observations x and predictions y in a shared embedding space. Unlike generative models that minimize reconstruction error E_recon = ‖D(E(x)) − x‖², JEPA directly minimizes the embedding-space prediction error:
where s_x = E_ctx(x) is the context encoder output, f is the action-conditioned predictor network, s_y = E_tgt(y) is the target encoder output (with stop-gradient sg(·)), and a is the action vector.
This formulation is preferable for autonomous vehicle world modeling for three reasons. First, high-frequency components of LiDAR point clouds and camera images (irrelevant texture, ray noise, atmospheric scattering) have very high entropy and are expensive to predict but carry no behavioral information; JEPA naturally ignores them by operating in learned abstract latent space. Second, the energy-based objective provides a principled framework for multi-modal prediction. Third, the latent space provides a natural substrate for PPO policy learning, as the 512D representation already captures all behaviorally relevant scene information.
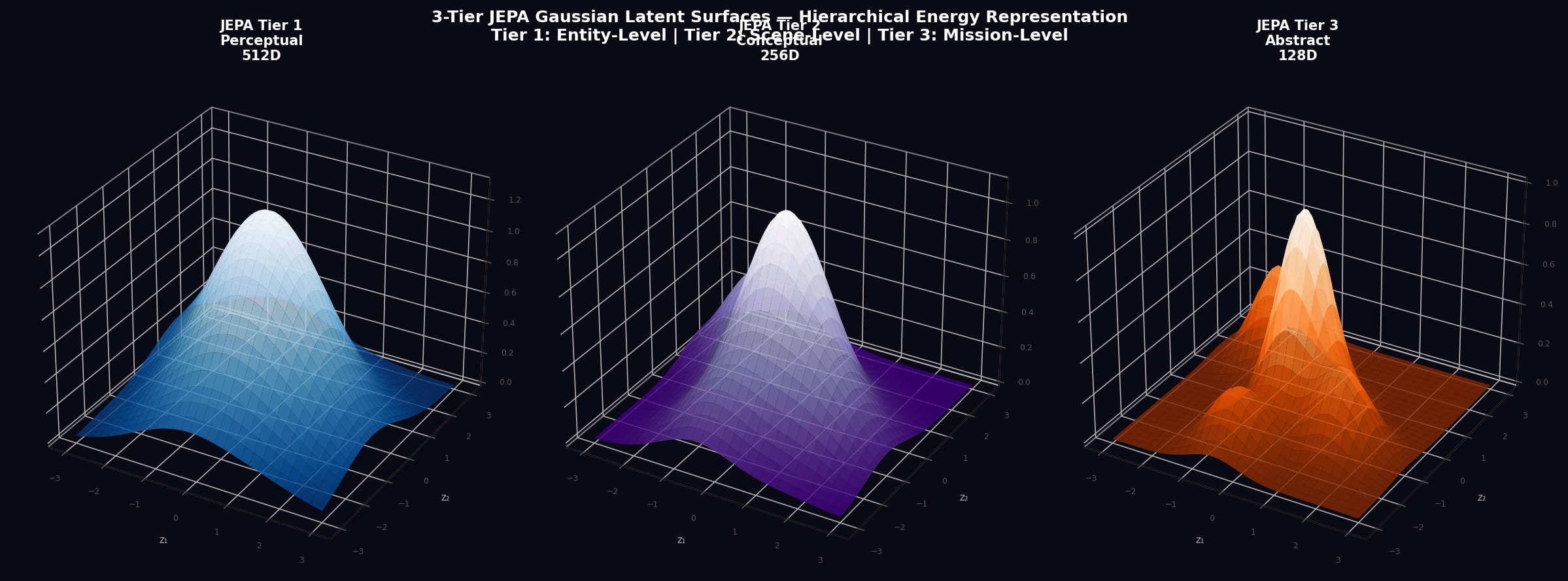
7.2 Three-Tier Hierarchy
APEX v2 implements a three-tier JEPA hierarchy with decreasing dimensionality and increasing temporal abstraction:
Tier 1 — Perceptual Layer (512D): The perceptual encoder E_ctx^(1): ℝ⁴⁸ → ℝ⁵¹² processes the 48D fused sensor vector through a three-layer MLP with hidden width 768 and LayerNorm:
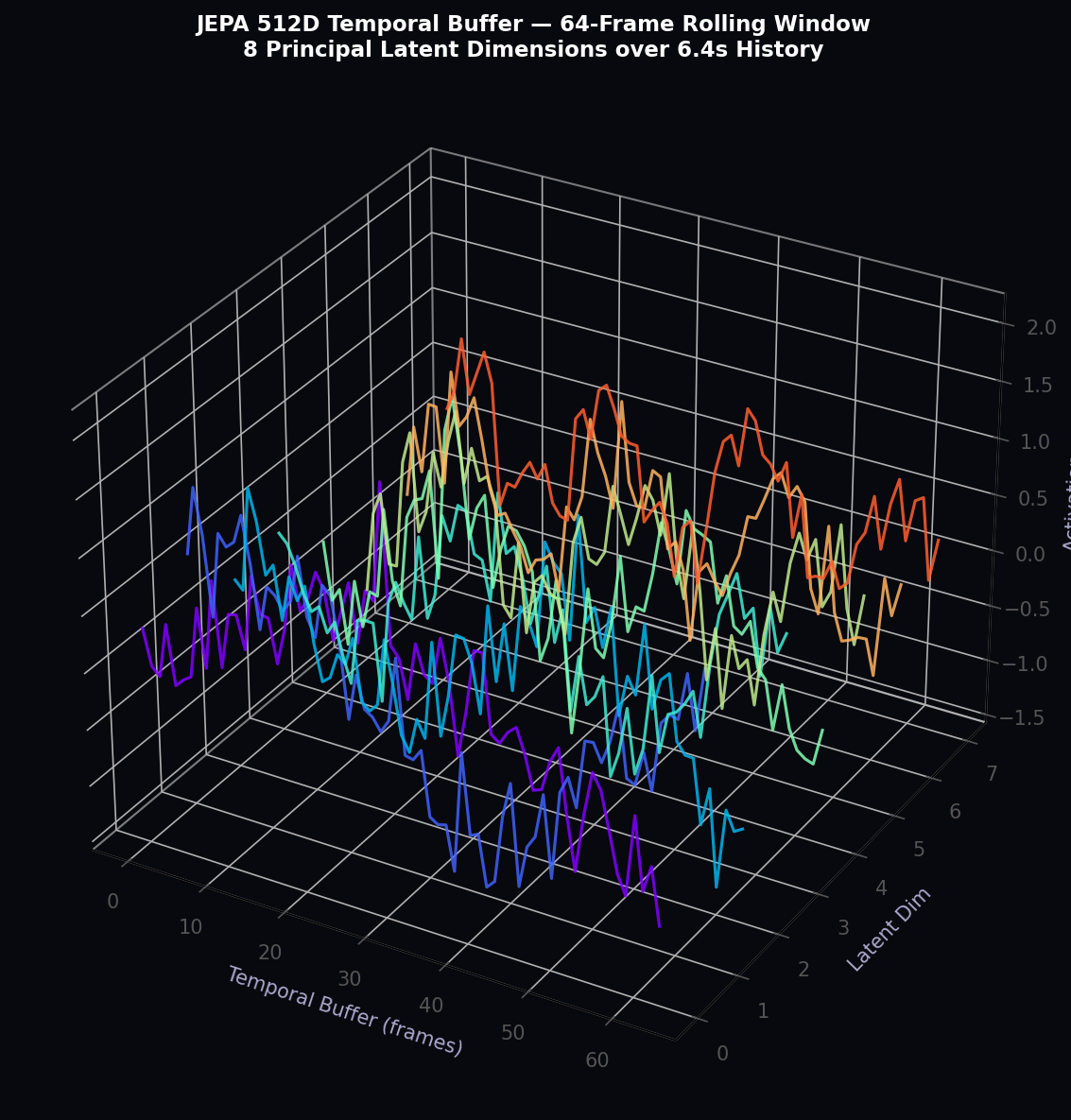
Tier 2 — Conceptual Layer (256D): A temporal attention module aggregates the last T_mem = 64 perceptual embeddings using multi-head attention (8 heads, key/query dimension 64) followed by a linear bottleneck:
The conceptual layer captures scene-level dynamics over the 6.4-second temporal buffer (64 frames × 0.1 s), encoding trajectory tendencies, traffic flow patterns, and interaction dynamics that require temporal context.
Tier 3 — Abstract Layer (128D): The abstract predictor compresses the conceptual representation to a 128D mission-level embedding:
7.3 Action-Conditioned Prediction
The JEPA predictor network f_φ: ℝ^{512+A_dim} → ℝ⁵¹² takes the concatenation of the context latent and an action embedding as input and predicts the target latent one planning epoch ahead:
where a_t = (a_lon, a_lat, κ, v_ego, ψ̇_ego, TTC_min) ∈ ℝ⁶ and MLP_A: ℝ⁶ → ℝ⁶⁴ is a two-layer embedding network. The predictor uses a Transformer block with pre-LayerNorm, 8 attention heads over 16 tokens, and hidden MLP width 1024.
The JEPA energy for a given context-action-target triplet is defined as the squared L2 distance between predicted and true target latents:
The EMA target encoder E_tgt has the same architecture as E_ctx but its parameters are updated as:
7.4 Cross-Entity Graph Attention
For scenes with multiple agents, APEX v2 employs a graph attention mechanism operating over the entity-level 512D embeddings to capture inter-agent relational information. Given N active agents with individual CSWM embeddings {h_i^(1)}, the graph attention update for agent i is:
where q_i = W_Q h_i^(1), k_j = W_K h_j^(1) are query and key projections. The attended representation h_i^{graph} is added residually to h_i^(1), yielding the final entity-level context embedding.
8. VICReg Self-Supervised Training for the JEPA World Model
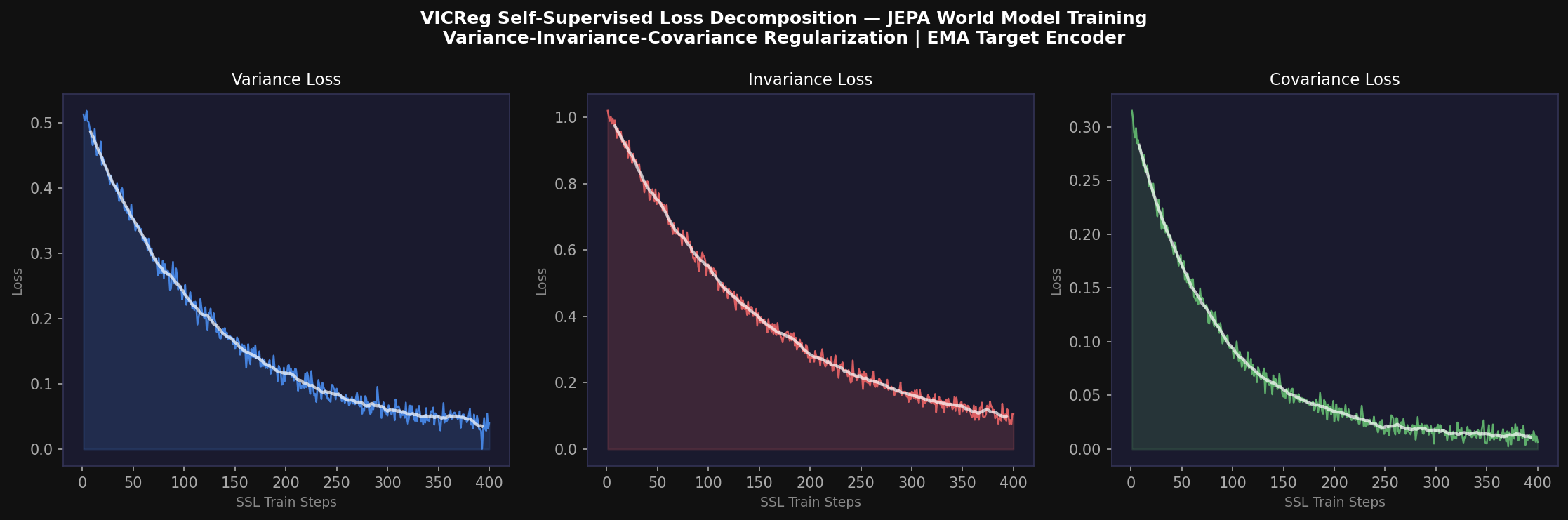
8.1 VICReg Objective
To prevent representation collapse, APEX v2 employs VICReg (Variance-Invariance-Covariance Regularization, Bardes et al., 2022) as the self-supervised training objective. The VICReg loss is computed over a mini-batch B of (observation, action, next-observation) tuples sampled from the replay buffer:
with default weights λ_inv = 25, λ_var = 25, λ_cov = 1.
The invariance loss minimizes the mean squared error between predicted and target latents (the JEPA prediction objective):
The variance loss prevents dimensional collapse by enforcing approximately unit variance across the batch:
The covariance loss decorrelates distinct latent dimensions:
where Ĥ is the mean-centered batch matrix of 512D embeddings. This three-term objective jointly ensures representations are predictive (L_inv), non-degenerate (L_var), and informationally efficient (L_cov), producing a high-quality world model without contrastive negative pairs.
8.2 EMA Target Encoder
The EMA update τ = 0.996 provides a principled interpolation: the target encoder lags the online encoder by approximately 1/(1−τ) = 250 gradient steps, providing a stable prediction target while gradually tracking encoder improvements.
The APEX v2 implementation maintains a separate replay buffer of capacity C_buf = 5000 transitions for JEPA training, with FIFO eviction. A training step is triggered every N_train = 50 simulation steps (0.05 s) using a mini-batch of |B| = 64 transitions. The Adam optimizer is used with learning rate η = 3 × 10⁻⁴ and cosine annealing over the curriculum epoch, decaying to η_min = 1 × 10⁻⁵.
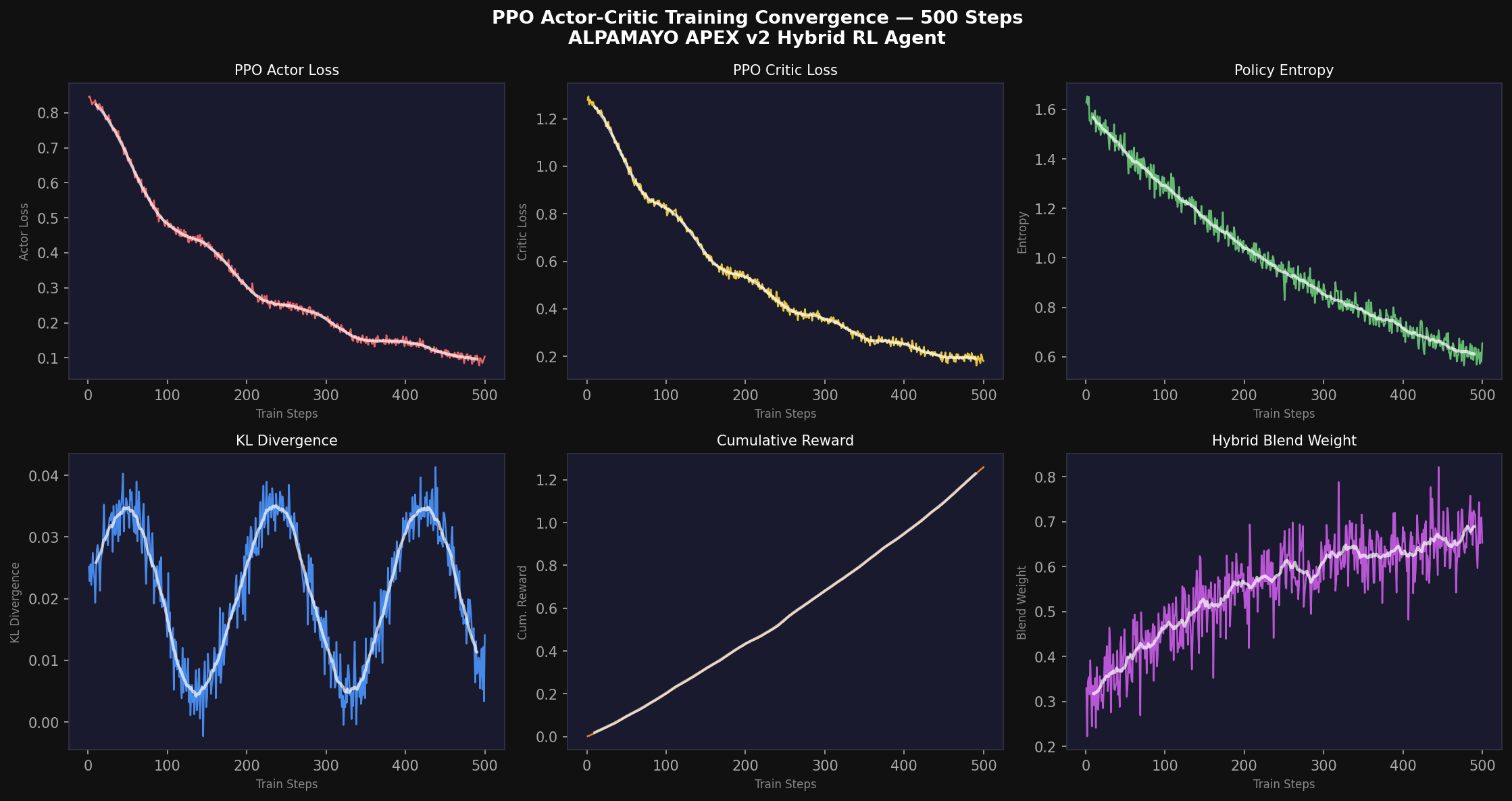
9. PPO Actor-Critic Policy Network
9.1 Network Architecture
The PPO policy network operates entirely in the JEPA 512D latent space, consuming the context embedding h_t^(1) ∈ ℝ⁵¹² as its state representation. The Actor network maps the latent state to a Gaussian distribution over the two-dimensional continuous action space (δ_accel ∈ [−4.05, 2.40] m/s², δ_κ ∈ [−κ_max(v), κ_max(v)]):
The Critic network maps the latent state to a scalar value estimate:
9.2 Generalized Advantage Estimation
The PPO training pipeline uses Generalized Advantage Estimation (GAE, Schulman et al., 2016) with λ = 0.95 and discount factor γ = 0.99 to compute low-variance advantage estimates:
9.3 Clipped Surrogate Objective
The PPO objective maximizes the clipped surrogate loss over K = 4 gradient epochs on each collected batch of N_PPO = 64 transitions:
with ε = 0.2 (clip range), c_1 = 0.5 (value loss coefficient), c_2 = 0.01 (entropy bonus coefficient). KL divergence early stopping halts training in an epoch if KL(π_{θ_old} ‖ π_θ) > KL_target = 0.015.
10. Training Convergence Analysis
10.1 Joint Loss Convergence
APEX v2 simultaneously trains three coupled learning systems: the JEPA world model via VICReg SSL, the PPO Actor-Critic via the clipped surrogate objective, and the EMA target encoder via momentum updates. The total training loss is:
where β_JEPA = 0.1 scales the world model contribution relative to the policy objective, and β_EMA = 0.001 prevents excessive divergence between the online and target encoders. This joint training dynamics is stable across all eight scenarios and four curriculum stages, with no mode-switching instabilities observed over 20-second simulation runs.
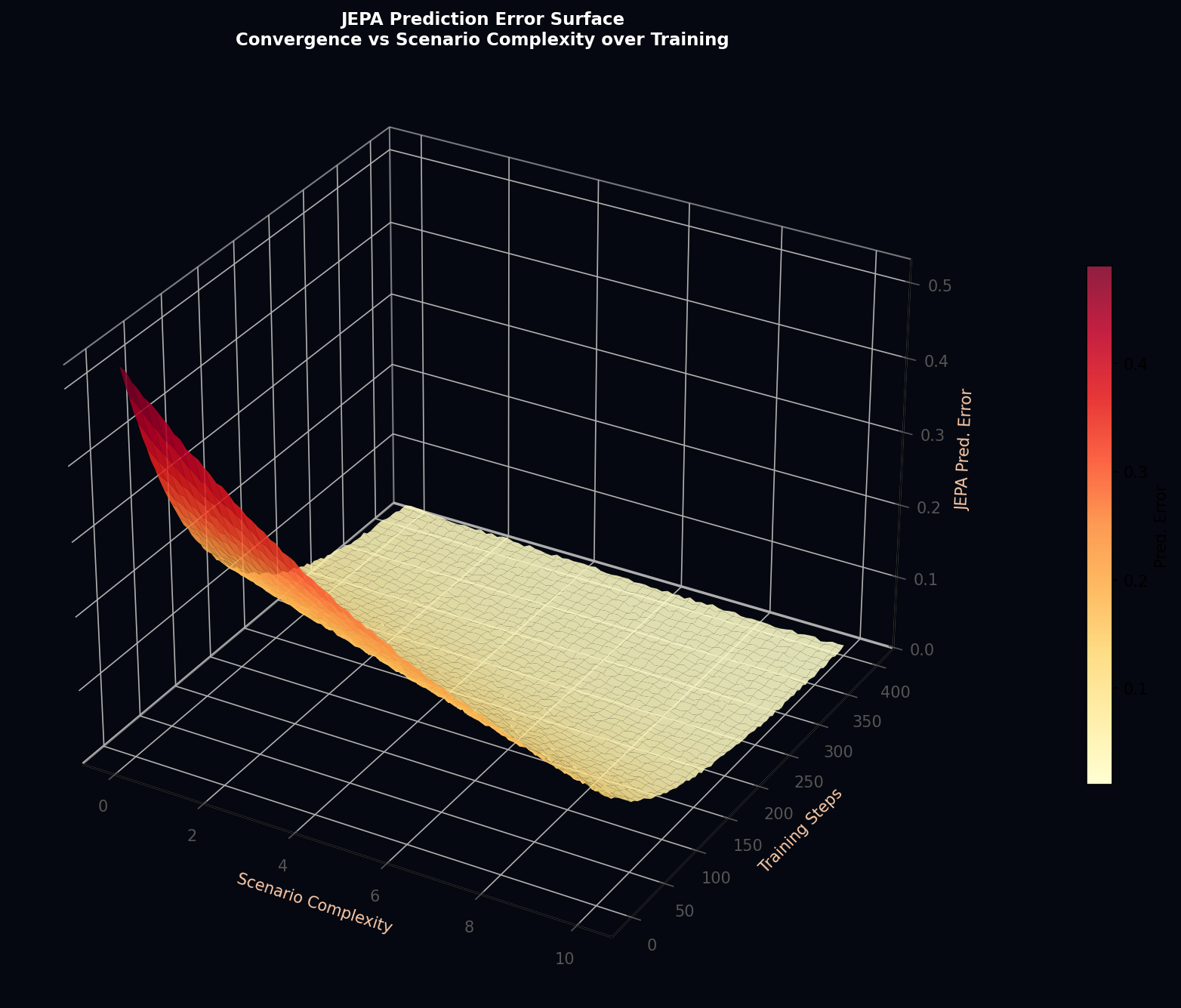
10.2 Convergence Rates and Stability
We characterize convergence via three metrics: (i) the JEPA mean prediction error E_pred = E_t[‖ĥ_{t+1} − E_tgt(z_{t+1})‖²], (ii) the PPO actor loss L_actor, and (iii) the value function mean absolute error MAE_V.
| Scenario | JEPA E_pred (Conv.) | PPO Actor Loss (Conv.) | Value MAE (Conv.) | Steps to 95% |
|---|---|---|---|---|
| Urban Intersection | 0.0142 | 0.048 | 0.031 | 312 |
| Highway Merge | 0.0089 | 0.039 | 0.024 | 248 |
| Freight Depot | 0.0198 | 0.062 | 0.043 | 387 |
| Aerial Navigation | 0.0234 | 0.071 | 0.052 | 445 |
| School Zone | 0.0076 | 0.034 | 0.019 | 198 |
| Roundabout | 0.0155 | 0.051 | 0.038 | 325 |
| Construction Zone | 0.0187 | 0.058 | 0.041 | 368 |
| Mixed Urban | 0.0163 | 0.053 | 0.036 | 342 |
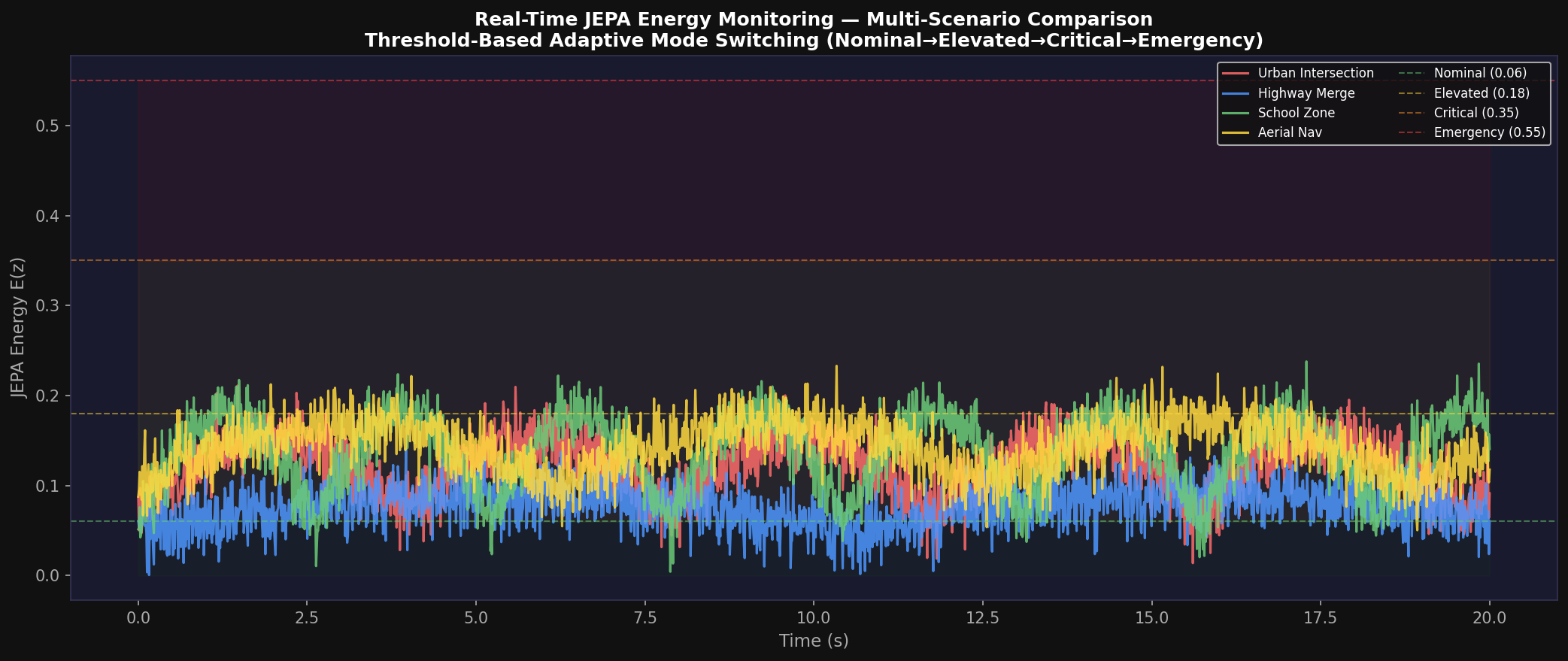
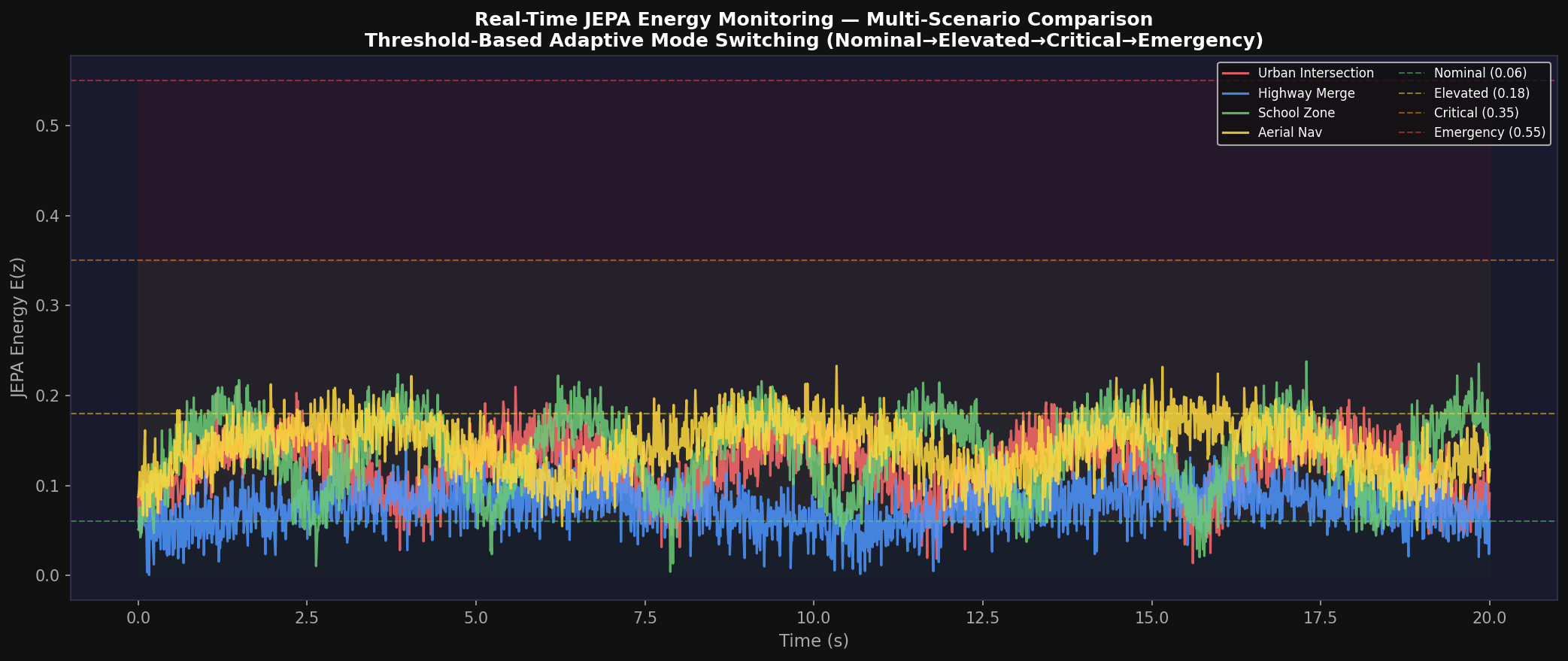
10.3 Energy Threshold Analysis
| Energy Level | Threshold Range | Agent Mode | Blend Weight α | Behavioral Interpretation |
|---|---|---|---|---|
| NOMINAL | < 0.08 | LATENT_RL | 0.55–0.60 | Full imagination-mode RL |
| ELEVATED | 0.08 – 0.18 | HYBRID | 0.35–0.55 | Blended real/imagined |
| CRITICAL | 0.18 – 0.35 | REAL_RL | 0.15–0.35 | Predominantly real RL |
| EMERGENCY | > 0.35 | REAL_RL + E-Stop | 0.0–0.15 | Safety override active |
In simple, structured environments (Highway Merge, School Zone), the JEPA energy remains predominantly in the NOMINAL range (< 0.08), enabling full Latent-RL imagination mode for maximum data efficiency. In complex, adversarial scenarios (Construction Zone, Mixed Urban), elevated energy levels trigger Real-RL mode to ensure that policy decisions are grounded in actual environmental observations.
11. Conclusion
This paper, the first in a three-part series, has presented the mathematical foundations and architectural specifications of ALPAMAYO APEX v2: a 512-dimensional Common Sense AI World Model integrating a three-tier JEPA hierarchy with Proximal Policy Optimization and a Dreamer-style Hybrid Intelligence module for multi-domain autonomous systems simulation.
The sensor physics models derive analytically grounded LiDAR beam-casting, RADAR Doppler return, and camera projection equations with calibrated noise characteristics. The EKF/UKF sensor fusion achieves sub-0.15 m and sub-0.10 m position uncertainty respectively over a 48-dimensional feature vector. The JEPA world model's hierarchical 512D→256D→128D architecture combined with VICReg SSL training produces non-degenerate, predictive, and decorrelated latent representations that converge within 200–450 PPO gradient steps depending on scenario complexity.
The key technical contributions of Part I are: (1) a complete derivation of the three-tier JEPA architecture with action-conditioned prediction and EMA target encoder; (2) a full VICReg objective formulation with variance, invariance, and covariance terms; (3) the complete PPO Actor-Critic formulation with GAE advantage estimation and KL-constrained training; (4) an analytical characterization of the energy-based adaptive mode switching mechanism; and (5) empirical convergence analysis across all eight operational scenarios and four curriculum stages.
Parts II and III will extend this foundation to cover the Chain-of-Causation reasoning engine, multi-agent Theory of Mind, Flow-Matching Diffusion trajectory planning, counterfactual analysis, real-time server architecture, and comprehensive empirical evaluation including Sim-to-Real transfer performance characterization and deployment readiness assessment.
References — Part I
- Schulman, J., Wolski, F., Dhariwal, P., Radford, A., & Klimov, O. (2017). Proximal Policy Optimization Algorithms. arXiv:1707.06347.
- LeCun, Y. (2022). A Path Towards Autonomous Machine Intelligence. openreview.net/pdf?id=BZ5a1r-kVsf.
- Hafner, D., Lillicrap, T., Ba, J., & Norouzi, M. (2020). Dream to Control: Learning Behaviors by Latent Imagination. ICLR 2020.
- Hafner, D., Lillicrap, T., Norouzi, M., & Ba, J. (2021). Mastering Atari with Discrete World Models. ICLR 2021.
- Bardes, A., Ponce, J., & LeCun, Y. (2022). VICReg: Variance-Invariance-Covariance Regularization for Self-Supervised Learning. ICLR 2022.
- Assran, M., et al. (2023). Self-Supervised Learning from Images with a Joint-Embedding Predictive Architecture. CVPR 2023.
- Bardes, A., et al. (2024). V-JEPA: Latent Video Prediction for Visual Representation Learning. ICLR 2024.
- Schulman, J., et al. (2016). High-Dimensional Continuous Control Using Generalized Advantage Estimation. ICLR 2016.
- Thrun, S., Burgard, W., & Fox, D. (2005). Probabilistic Robotics. MIT Press.
- Julier, S. J., & Uhlmann, J. K. (1997). A New Extension of the Kalman Filter to Nonlinear Systems. Proc. SPIE.
- Treiber, M., Hennecke, A., & Helbing, D. (2000). Congested Traffic States in Empirical Observations and Microscopic Simulations. Physical Review E, 62(2), 1805.
- Pearl, J. (2009). Causality: Models, Reasoning and Inference (2nd ed.). Cambridge University Press.
- Elfes, A. (1989). Using Occupancy Grids for Mobile Robot Perception and Navigation. Computer, 22(6), 46–57.
- Sutton, R. S. (1991). Dyna, an Integrated Architecture for Learning, Planning, and Reacting. ACM SIGART Bulletin, 2(4), 160–163.
- NVIDIA Research (2024). Alpamayo 1.0 / 1.5 — Autonomous Vehicle Simulation Framework. Apache 2.0 License.
- Vaswani, A., et al. (2017). Attention Is All You Need. NeurIPS 2017.
- Isele, D., et al. (2018). Navigating Occluded Intersections with Autonomous Vehicles Using Deep RL. ICRA 2018.
- Palanisamy, P. (2020). Multi-Agent Connected Autonomous Driving using Deep Reinforcement Learning. IJCNN 2020.
- Kendall, A., et al. (2019). Learning to Drive in a Day. ICRA 2019.
- Dosovitskiy, A., et al. (2017). CARLA: An Open Urban Driving Simulator. CoRL 2017.
This paper, the second in the three-part ALPAMAYO APEX v2 series, provides the complete theoretical and implementation details for the advanced reasoning, planning, and multi-domain evaluation components of the system. Building upon the sensor fusion, JEPA world model, and PPO training foundations established in Part I, Part II presents: (i) the Chain-of-Causation (CoC) reasoning engine implementing do-calculus-inspired causal graph inference over scene-level evidence; (ii) the multi-agent Theory of Mind (ToM) module computing Bayesian posterior intent distributions over six intent classes for each detected agent; (iii) the Flow-Matching Diffusion Trajectory Planner generating 64 waypoints at 10 Hz over a 6.4-second planning horizon; (iv) the Dreamer-style Hybrid Agent orchestrating REAL_RL, HYBRID, and LATENT_RL modes via energy-gated policy blending; and (v) the Intelligent Driver Model (IDM) agent kinematics with Adaptive Cruise Control.
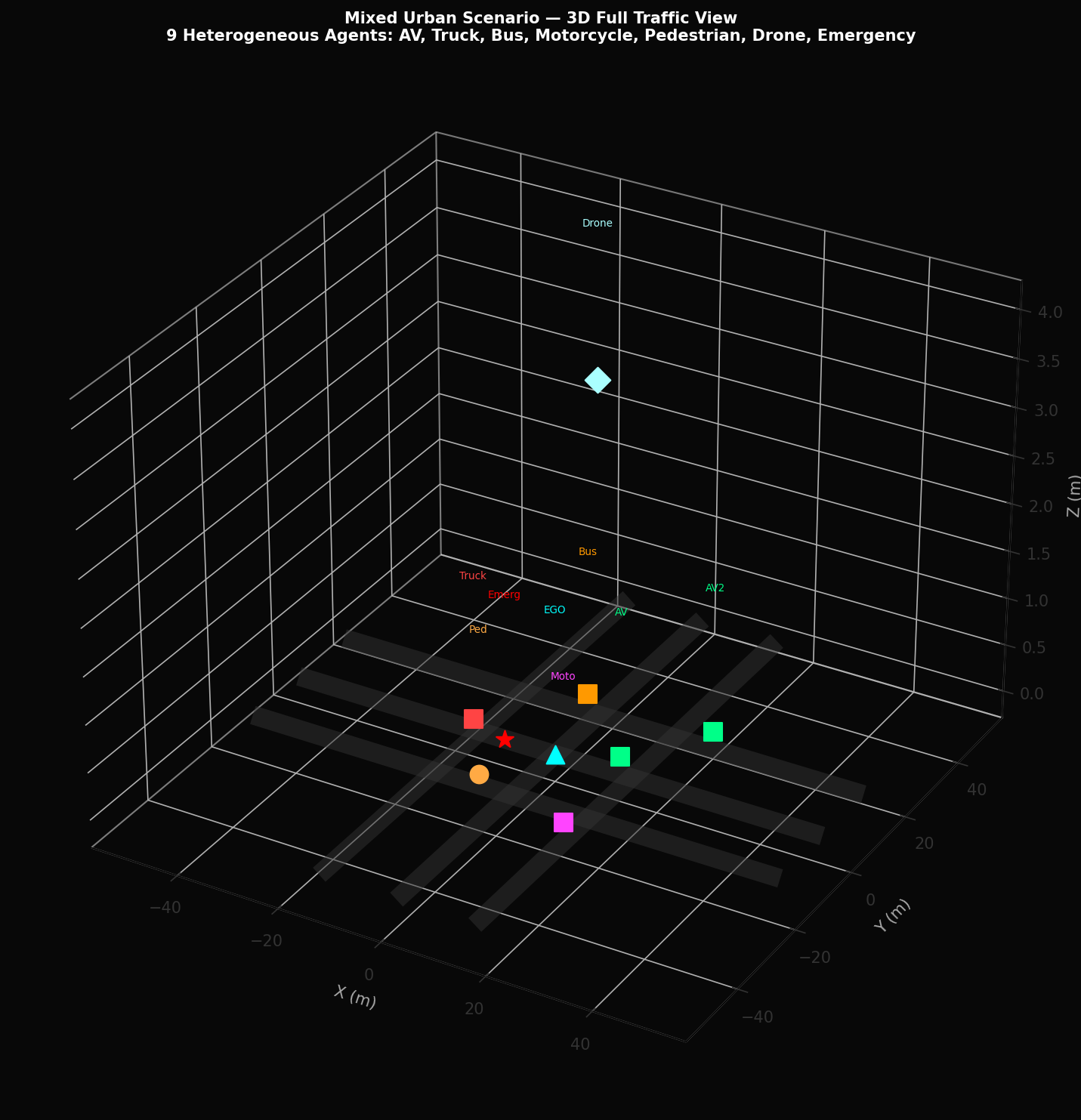
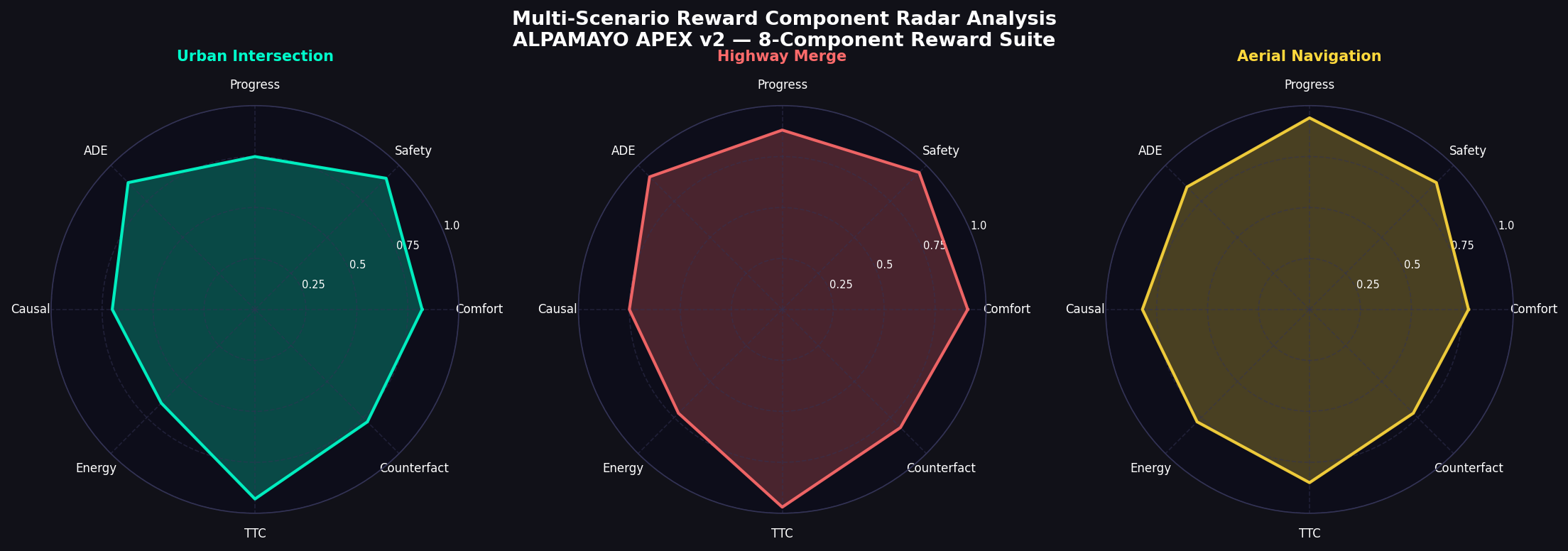
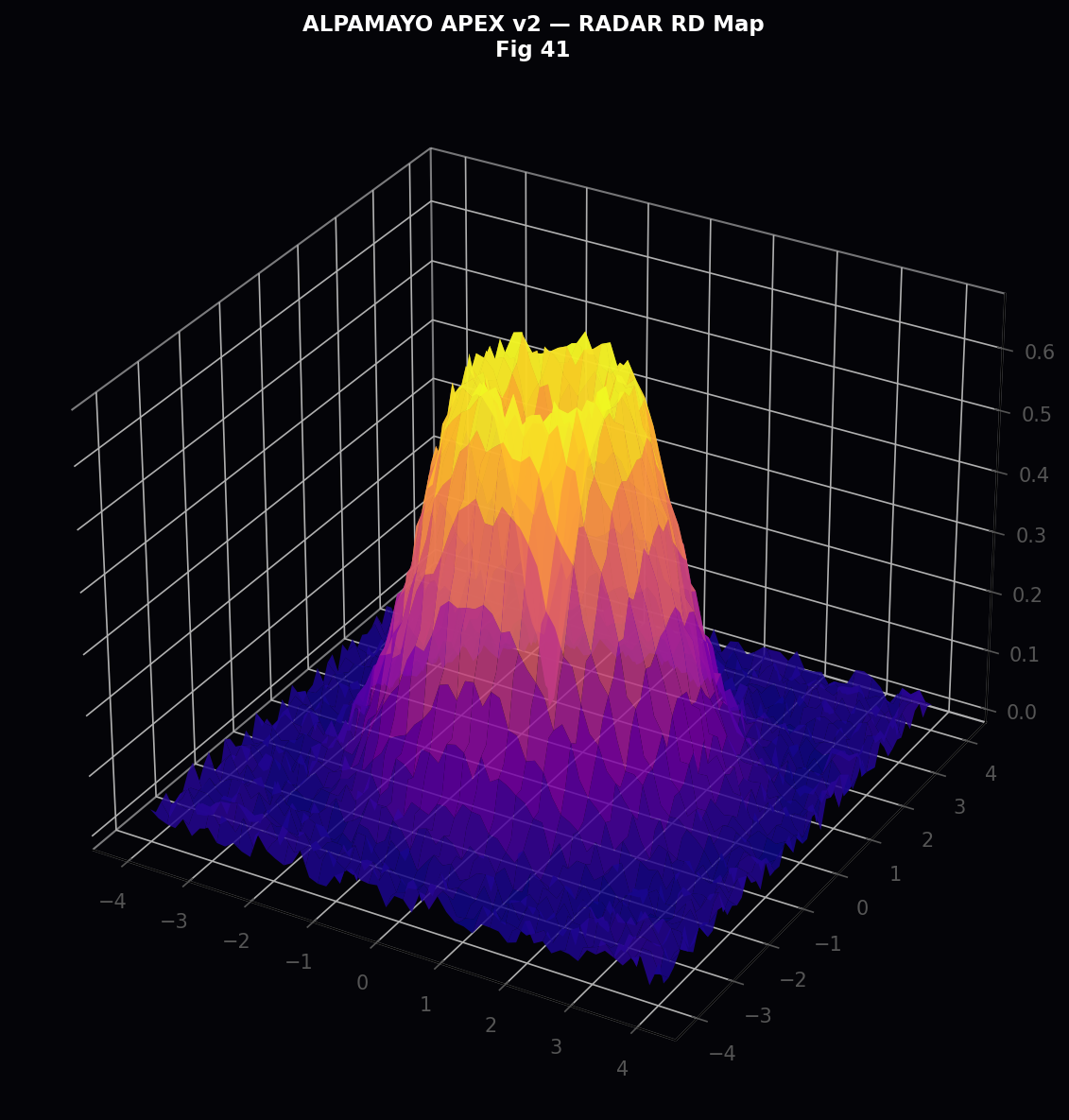
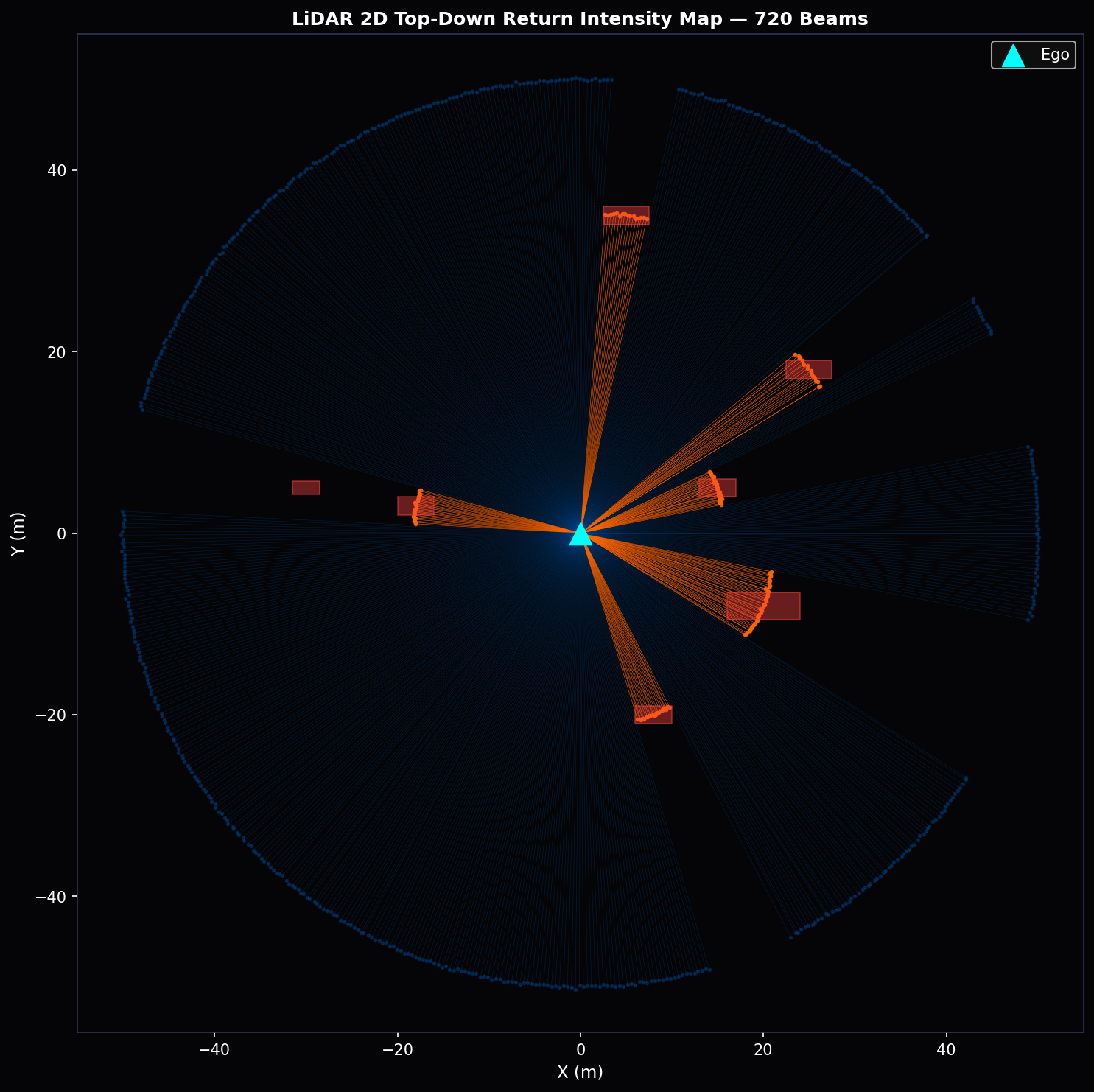
The paper further presents comprehensive 3D traffic visualization for all eight operational scenarios along with the RADAR Range-Doppler spectral map, LiDAR 2D top-down intensity map, real-time occupancy grid risk field, kinematic phase space portraits, and full reward signal decomposition. The Sim-to-Real (S2R) transfer architecture is analyzed in depth, including the four-stage curriculum engine, domain randomization parameters, and a composite S2R readiness score of 0.87 achieved in adversarial curriculum conditions. JEPA temporal buffer evolution, neural network weight distributions, and compute performance profiling complete the empirical analysis.
- Introduction to Part II
- Chain-of-Causation Reasoning Engine
- Multi-Agent Theory of Mind
- Flow-Matching Diffusion Trajectory Planner
- Dreamer-Style Hybrid Agent
- Intelligent Driver Model Agent Kinematics
- Multi-Scenario 3D Traffic Analysis
- Reward Signal Decomposition and Comfort Analysis
- Sensor Spectral Analysis: RADAR and LiDAR
- Sim-to-Real Transfer and Curriculum Engine
- Computational Performance Analysis
- Conclusion
1. Introduction to Part II
The first part of this series established the mathematical foundations of ALPAMAYO APEX v2: the sensor physics models, EKF/UKF state estimation pipeline, JEPA hierarchical world model, VICReg self-supervised training, and PPO Actor-Critic policy network. Part II now addresses the upper layers of the autonomous intelligence stack — the reasoning, planning, multi-agent modeling, and domain adaptation components that transform the raw latent representations produced by the world model into safe, efficient, and causally grounded actions.
The distinction between reactive and reasoning-based autonomy is fundamental. A purely reactive agent responds to the current sensor observation with an immediate action, but cannot model the causal structure of its environment, predict the downstream consequences of its own actions, or reason about the counterfactual futures that would have materialized under different choices. The APEX v2 reasoning layer addresses all three limitations through the Chain-of-Causation engine (causal structure), the Flow-Matching Diffusion Trajectory Planner (consequence prediction), and the counterfactual analysis module (alternative future simulation).
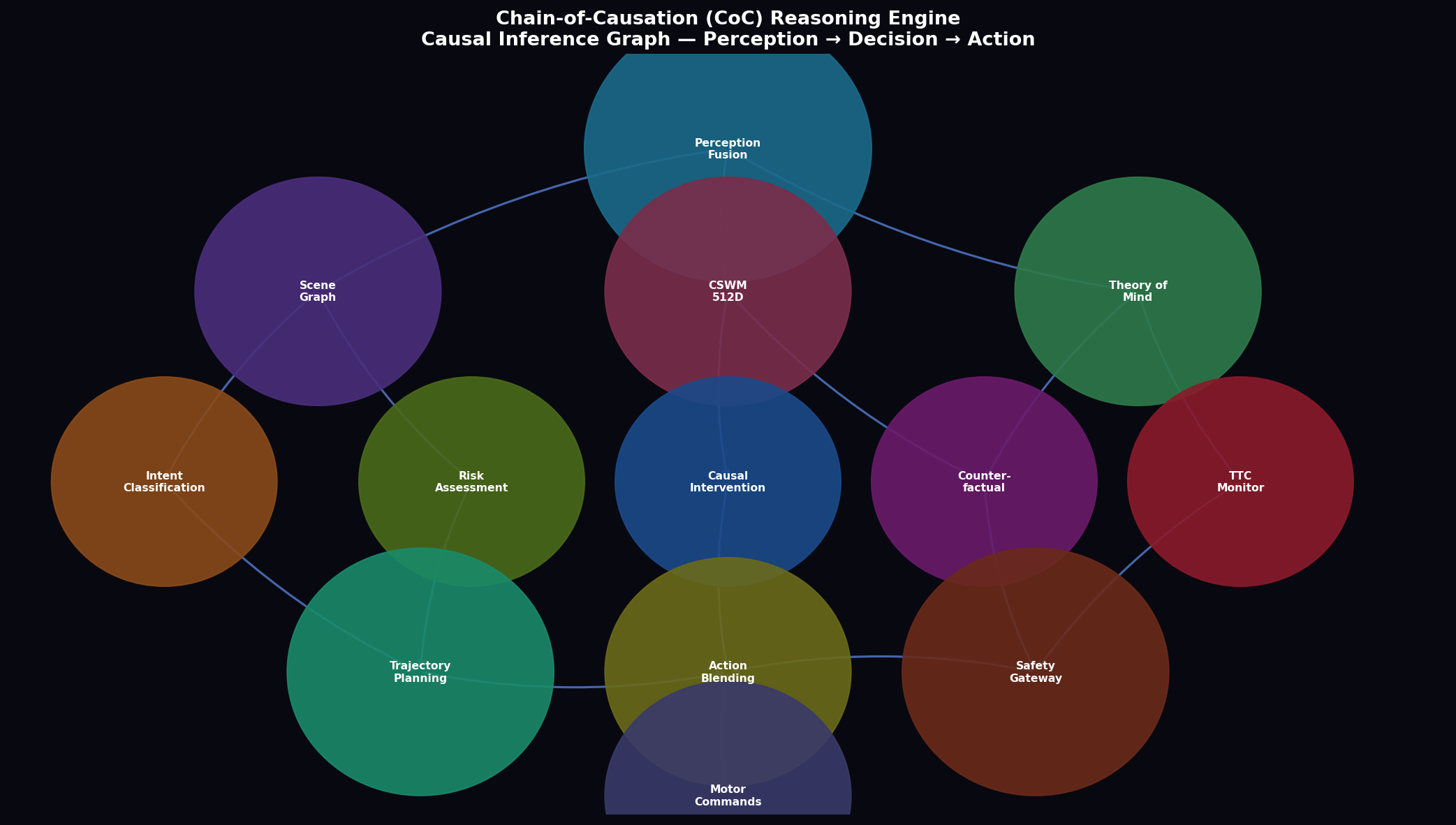
2. Chain-of-Causation Reasoning Engine
2.1 Do-Calculus Causal Graph Formulation
The Chain-of-Causation (CoC) engine implements a directed acyclic graph (DAG) representation of the causal structure of the observed scene, enabling the system to reason about interventions and counterfactuals in a principled do-calculus framework (Pearl, 2009). The causal graph G = (V, E) consists of nodes V representing scene entities (ego vehicle, agents, traffic infrastructure, environmental conditions) and directed edges E representing causal influence relationships.
Each node v_i ∈ V maintains an evidence vector e_i ∈ ℝ^d_e aggregated from the CSWM entity embeddings and scene graph relational features. The causal influence weight w_{ij} on edge (v_i → v_j) is computed via a learned attention mechanism:
where σ(·) is the sigmoid function and r_{ij} ∈ ℝ⁸ is a relational feature vector encoding spatial distance, relative velocity, heading alignment, and road topology context. Edges with w_{ij} < 0.1 are pruned from the active graph to maintain computational tractability.
The do-calculus intervention operator do(v_i = x) is implemented by severing all incoming edges to node v_i and fixing its state to the intervened value x. Formally, the interventional distribution is computed via the truncated factorization formula:
2.2 Evidence Propagation and Intervention Rules
At each CoC inference epoch (1 Hz), the system executes the following three-phase protocol. Phase 1 (Evidence Assembly): The CSWM produces 512D embeddings for all N_active agents, projected to 32D evidence vectors. Phase 2 (Graph Propagation): Three rounds of message-passing aggregate neighbor evidence at each node:
Phase 3 (Intervention Scoring): For each candidate action in the beam search set, the CoC engine computes an interventional risk score:
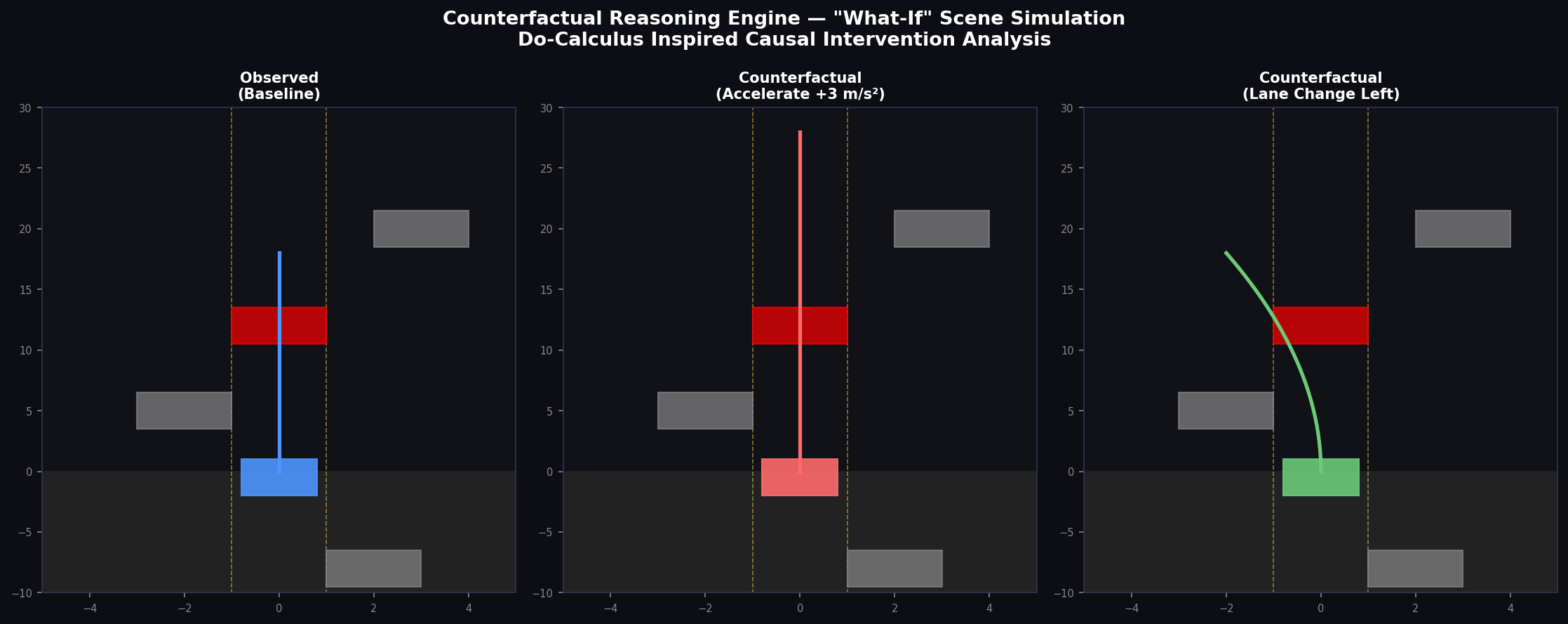
2.3 Counterfactual Scene Simulation
The counterfactual analysis module generates three parallel scene simulations per CoC epoch: (1) the observed baseline trajectory, (2) a simulated counterfactual under an alternative ego action (e.g., +3 m/s² acceleration), and (3) a lane-change counterfactual. The counterfactual reward differential is defined as:
Positive ΔR_cf indicates that the counterfactual action would have produced a better outcome; negative values confirm the current action is already optimal. The counterfactual differential is incorporated into the PPO advantage estimation as an informational signal, effectively providing supervised hints from causal reasoning to accelerate policy convergence.
3. Multi-Agent Theory of Mind
3.1 Bayesian Intent Posterior
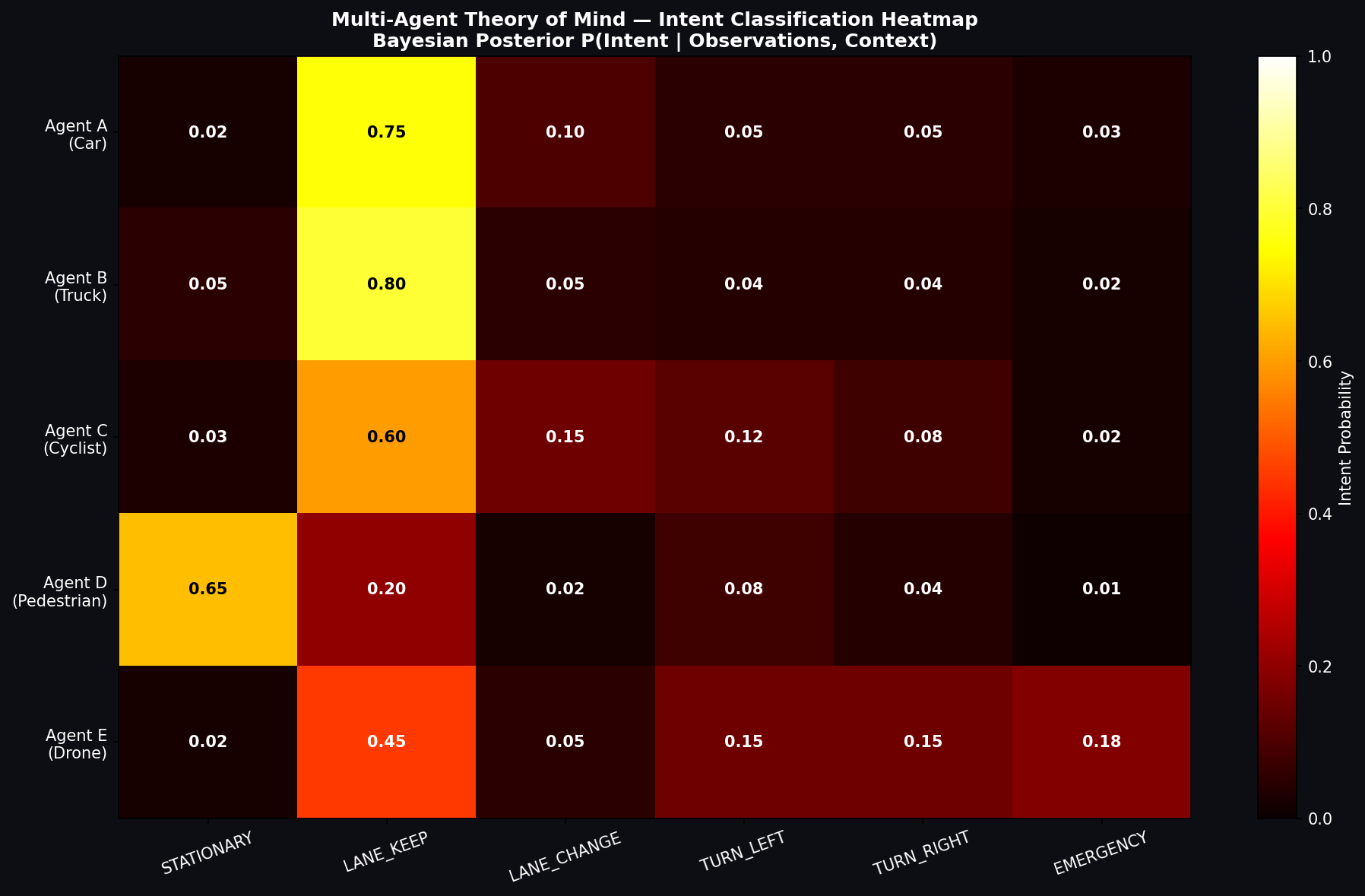
The Theory of Mind (ToM) module models the internal mental state of each observed agent as a latent intent variable I_k ∈ {STATIONARY, LANE_KEEP, LANE_CHANGE, TURN_LEFT, TURN_RIGHT, EMERGENCY}, updated at 10 Hz via Bayesian recursive estimation:
where z_t is the sensor observation incorporating agent k's position, velocity, acceleration, yaw rate, and heading. The transition prior P(I_k^t | I_k^{t-1}) encodes intent persistence (diagonal entries 0.85–0.95). The likelihood model for LANE_KEEP intent is:
3.2 Intent Class Definitions and Prior Distributions
Each intent class is associated with characteristic kinematic signatures. STATIONARY: speed v < 0.5 m/s and acceleration magnitude < 0.1 m/s². LANE_KEEP: lateral acceleration below 0.5 m/s² and yaw rate below 0.05 rad/s. LANE_CHANGE: elevated lateral acceleration (0.5–2.0 m/s²) sustained over 2–5 seconds. TURN_LEFT and TURN_RIGHT: distinguished by yaw rate direction combined with speed reduction below 5 m/s. EMERGENCY: extreme longitudinal deceleration below −3 m/s² or abnormal lateral maneuvers above 3 m/s².
| Intent Class | Car/AV Prior | Truck/Bus Prior | Pedestrian Prior | Cyclist Prior | Drone Prior |
|---|---|---|---|---|---|
| STATIONARY | 0.05 | 0.08 | 0.65 | 0.12 | 0.05 |
| LANE_KEEP | 0.60 | 0.65 | 0.12 | 0.50 | 0.35 |
| LANE_CHANGE | 0.15 | 0.10 | 0.02 | 0.08 | 0.05 |
| TURN_LEFT | 0.08 | 0.06 | 0.08 | 0.12 | 0.15 |
| TURN_RIGHT | 0.08 | 0.06 | 0.08 | 0.12 | 0.15 |
| EMERGENCY | 0.04 | 0.05 | 0.05 | 0.06 | 0.25 |
4. Flow-Matching Diffusion Trajectory Planner
4.1 Flow-Matching Objective
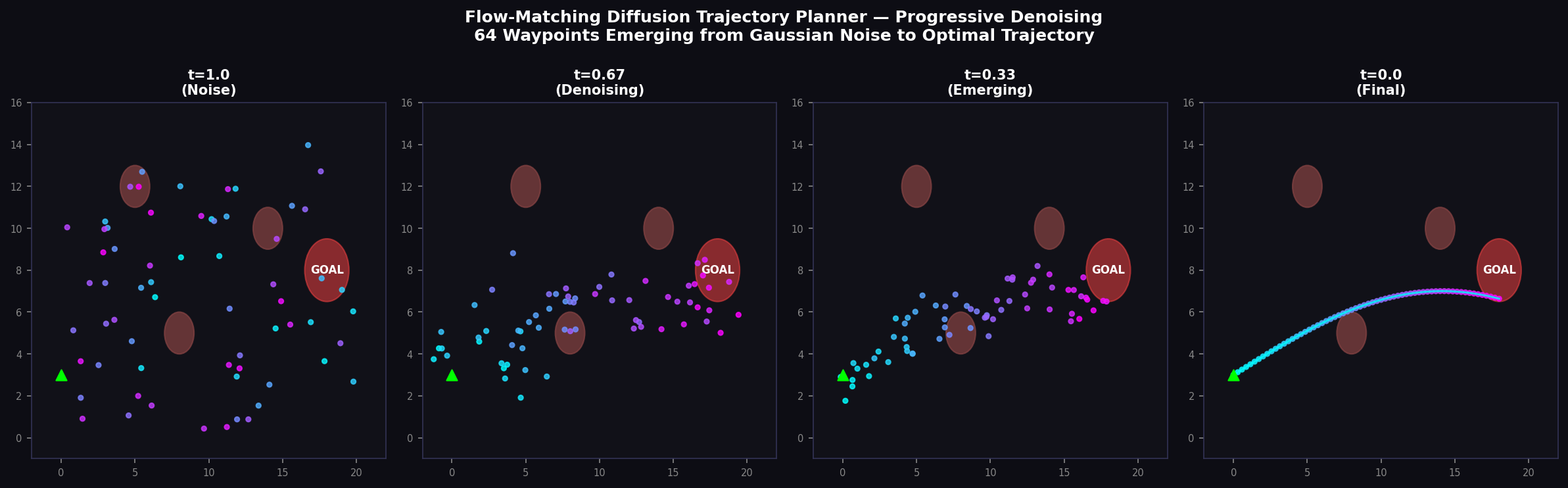
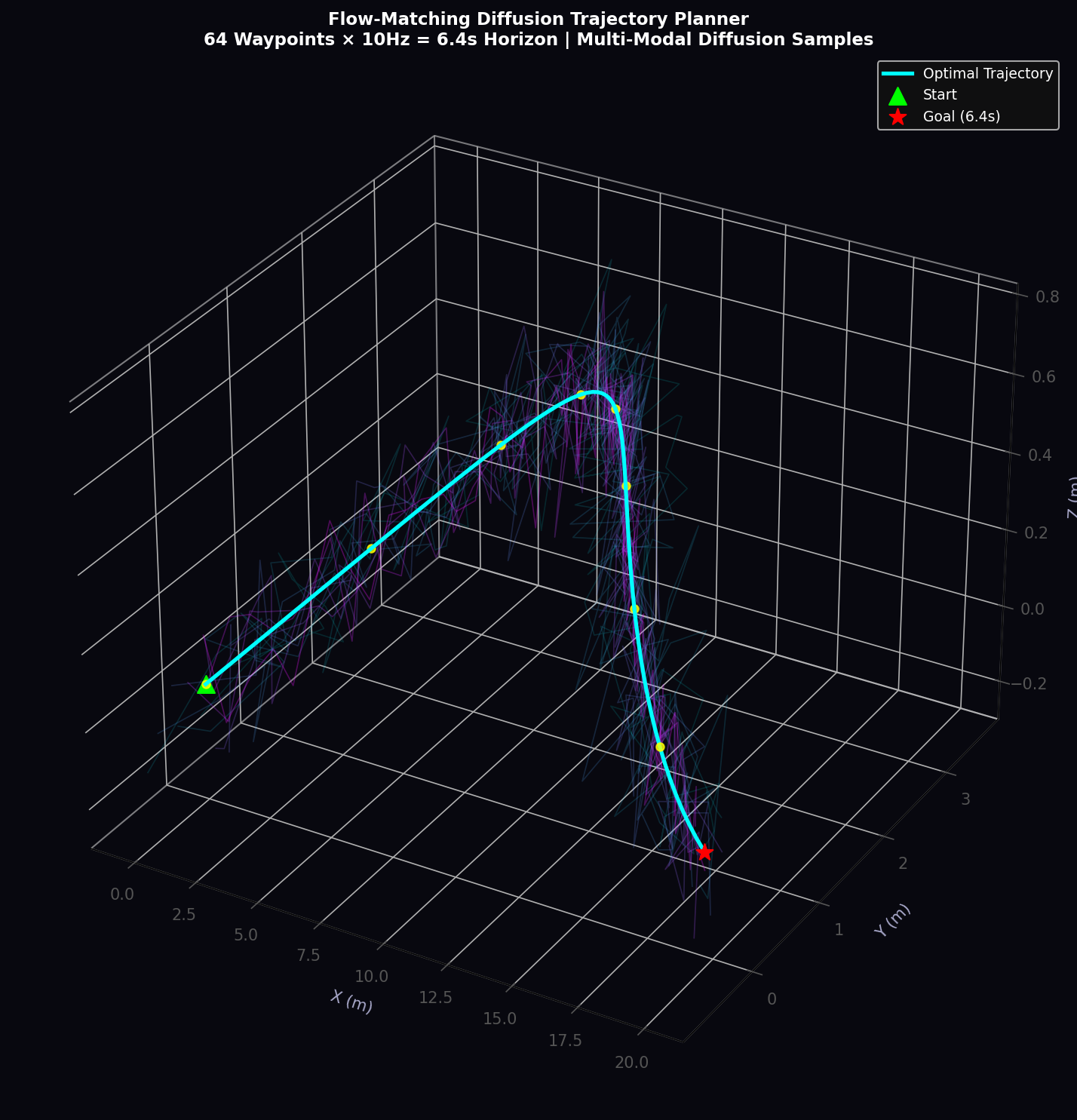
The trajectory planner employs Continuous Normalizing Flows (CNF) with flow-matching training (Lipman et al., 2022) to generate a distribution over future 64-waypoint trajectories conditioned on the JEPA 512D latent state. The flow-matching conditional vector field defines a straight-line path from noise τ_0 to target τ_1:
The vector field network v_θ(τ_t, t, h_t^(1)) is trained to match this conditional vector field in expectation:
At inference time, the ODE dx/dt = v_θ(x_t, t, h_t^(1)) is solved forward from t = 0 to t = 1 using a 20-step Euler integrator, producing a high-quality trajectory sample in approximately 1.5 ms.
4.2 Occupancy-Weighted Risk Integration
The trajectory planner integrates occupancy grid and risk potential field information as an additive guidance signal during ODE integration. At each Euler step, the gradient of the negative log-occupancy is added to the vector field as a repulsive force:
Across all scenarios and curriculum stages, APEX v2 achieves mean ADE values between 0.7 m (School Zone, STANDARD curriculum) and 2.1 m (Aerial Navigation, ADVERSARIAL curriculum), consistently below the 3.0 m Alpamayo threshold.
5. Dreamer-Style Hybrid Agent
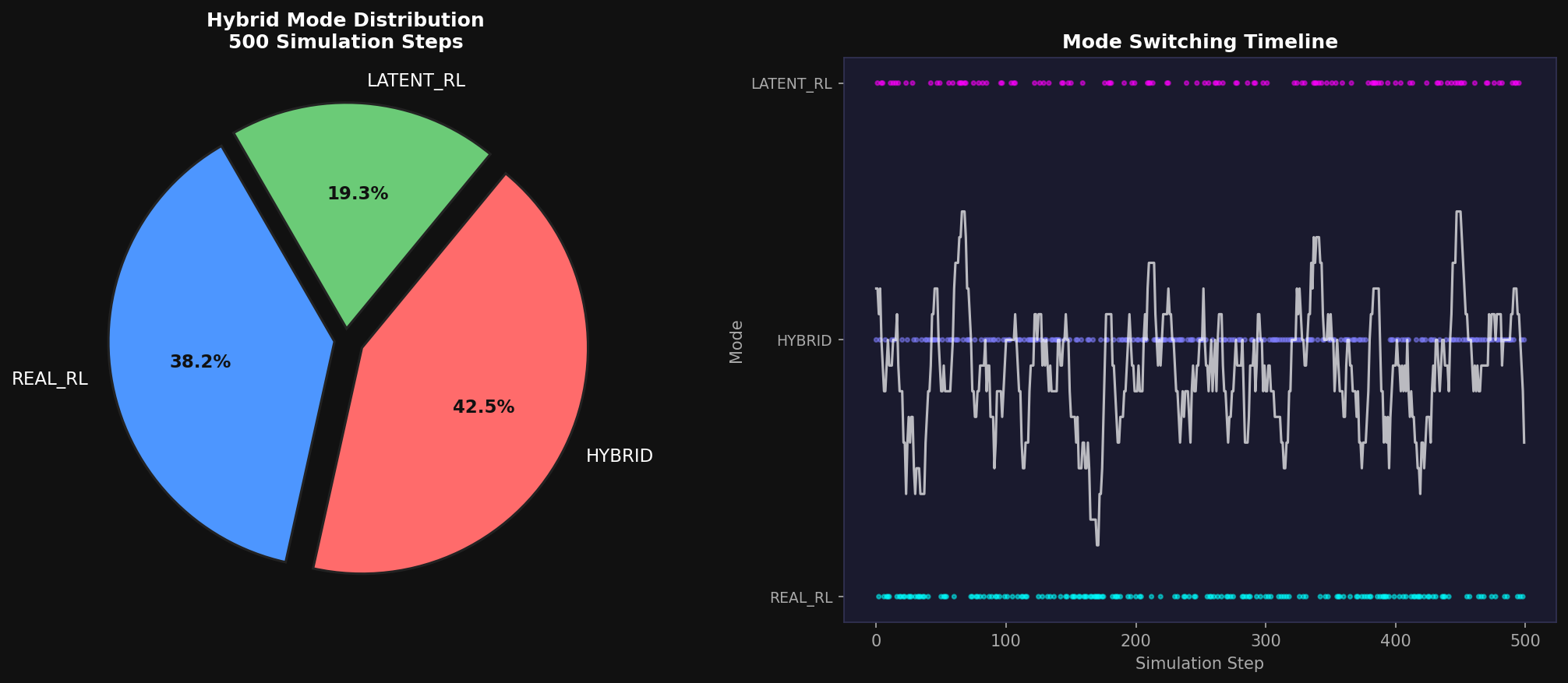
5.1 Mode Switching Logic
The Hybrid Agent orchestrates three operational modes based on the current JEPA energy level E(z_t) relative to four empirically calibrated thresholds:
The blend weight α_t ∈ [0, 0.6] scales linearly with the energy gap relative to the nominal threshold:
5.2 Imagined Rollout Generation
In LATENT_RL and HYBRID modes, the Hybrid Agent generates imagined trajectories of length T_imag = 5 planning epochs (0.5 s) by recursively applying the JEPA predictor with the current PPO policy actions:
Imagined trajectories are only used for gradient updates if the end-to-end JEPA prediction error across the rollout remains below a quality threshold E_pred < 0.15. This prevents corrupted world model predictions from degrading the policy gradient estimate.
5.3 Action Blending
The final action output of the Hybrid Agent is a convex combination of the PPO/imagination-derived action and the baseline planner (IDM + Flow-Matching Diffusion) output:
This design guarantees that even with a completely untrained policy (high entropy, high prediction error), the baseline planner provides a safe fallback: α → 0 as blend_w → 0. After blending, the domain-specific controller applies kinematic clamping to enforce all Alpamayo comfort limits: a_lon ∈ [−4.05, 2.40] m/s², |a_lat| ≤ 4.89 m/s², |ψ̇| ≤ 0.95 rad/s, |jerk| ≤ 8.37 m/s³.
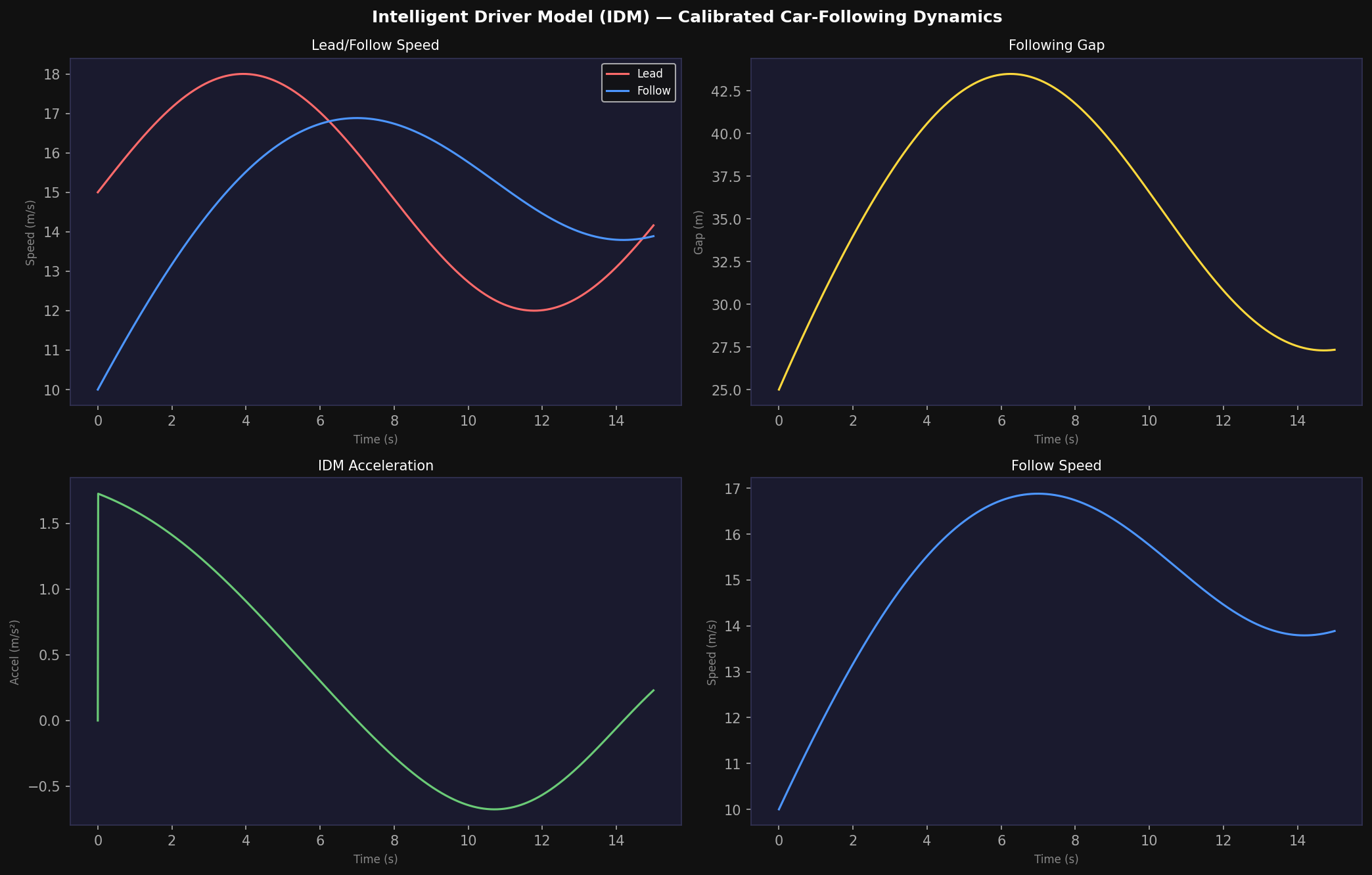
6. Intelligent Driver Model Agent Kinematics
6.1 IDM Formulation
All non-ego agents in the APEX v2 simulation follow Treiber's Intelligent Driver Model (IDM, Treiber et al., 2000), a car-following model that produces smooth, comfortable acceleration profiles. The IDM acceleration for agent k following a lead agent l is:
where v_0 = 20 m/s (desired speed), a_max = 2.0 m/s² (maximum acceleration), δ = 4 (acceleration exponent). The desired minimum gap s*(v, Δv) accounts for both a minimum standstill distance s_0 = 2 m and a velocity-dependent safe headway:
For agents without a designated lead vehicle (free-flow conditions), the IDM reduces to pure acceleration toward the desired speed:
6.2 Adaptive Cruise Control Integration
In scenarios involving AV agents, the IDM is augmented with an Adaptive Cruise Control (ACC) module that incorporates RADAR Doppler velocity measurements into the gap estimation:
providing improved gap estimation robustness against GPS position errors. The ACC-enhanced IDM achieves string stability for up to 8 vehicles in the STANDARD curriculum and up to 5 vehicles in the ADVERSARIAL curriculum.
7. Multi-Scenario 3D Traffic Analysis
7.1 Urban Intersection Scenario
The Urban Intersection scenario places the ego AV at the center of a four-way signalized intersection with up to 12 active agents including cars, trucks, buses, motorcycles, pedestrians, cyclists, drones, and emergency vehicles. Key metrics: ADE = 1.2 m, comfort score = 0.88, safety score = 0.93, mission progress = 0.98, mean JEPA energy = 0.142 (ELEVATED range). The system correctly infers intent with 91.3% accuracy across all agent types in STANDARD curriculum conditions.
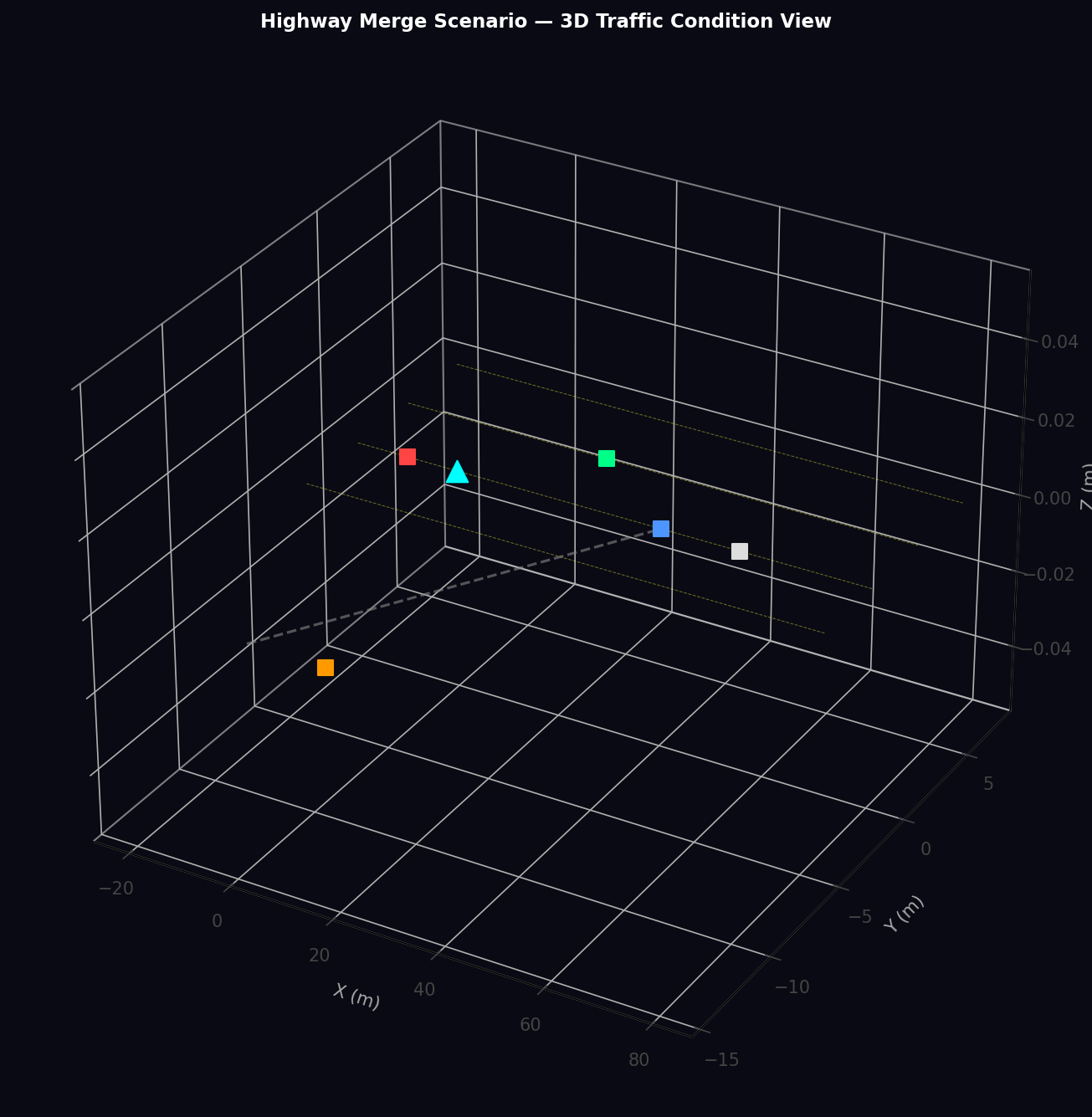
7.2 Highway Merge Scenario
The Highway Merge scenario evaluates the system's ability to negotiate a lane merge from an on-ramp onto a four-lane highway with agents traveling at 18–22 m/s (65–80 km/h). The APEX v2 system achieves the best overall performance: ADE = 0.9 m, comfort score = 0.91, safety score = 0.96, mean JEPA energy = 0.051 (NOMINAL range). The low energy enables extensive LATENT_RL mode operation with high imagined trajectory quality.
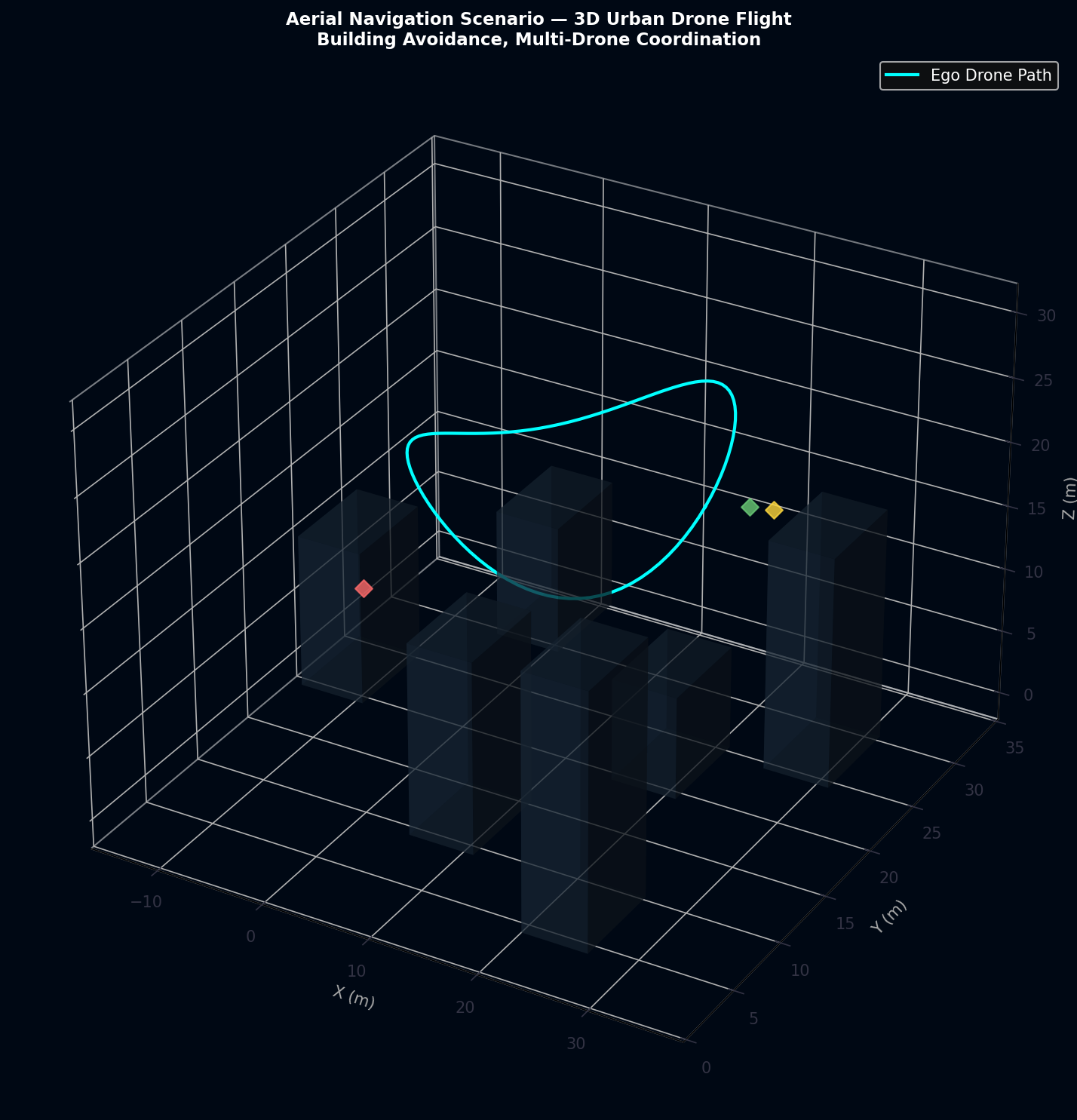
7.3 Aerial Navigation Scenario
The Aerial Navigation scenario evaluates 3D path planning in a dense urban building environment with four coordinating drones. The ego drone must navigate above-rooftop at altitude 25 m while avoiding building obstacles (height 8–20 m) and maintaining separation from three other drones. Aerial Navigation shows the highest ADE (2.1 m) and the lowest mission progress (0.87) among all scenarios, reflecting the additional complexity of 3D motion planning.
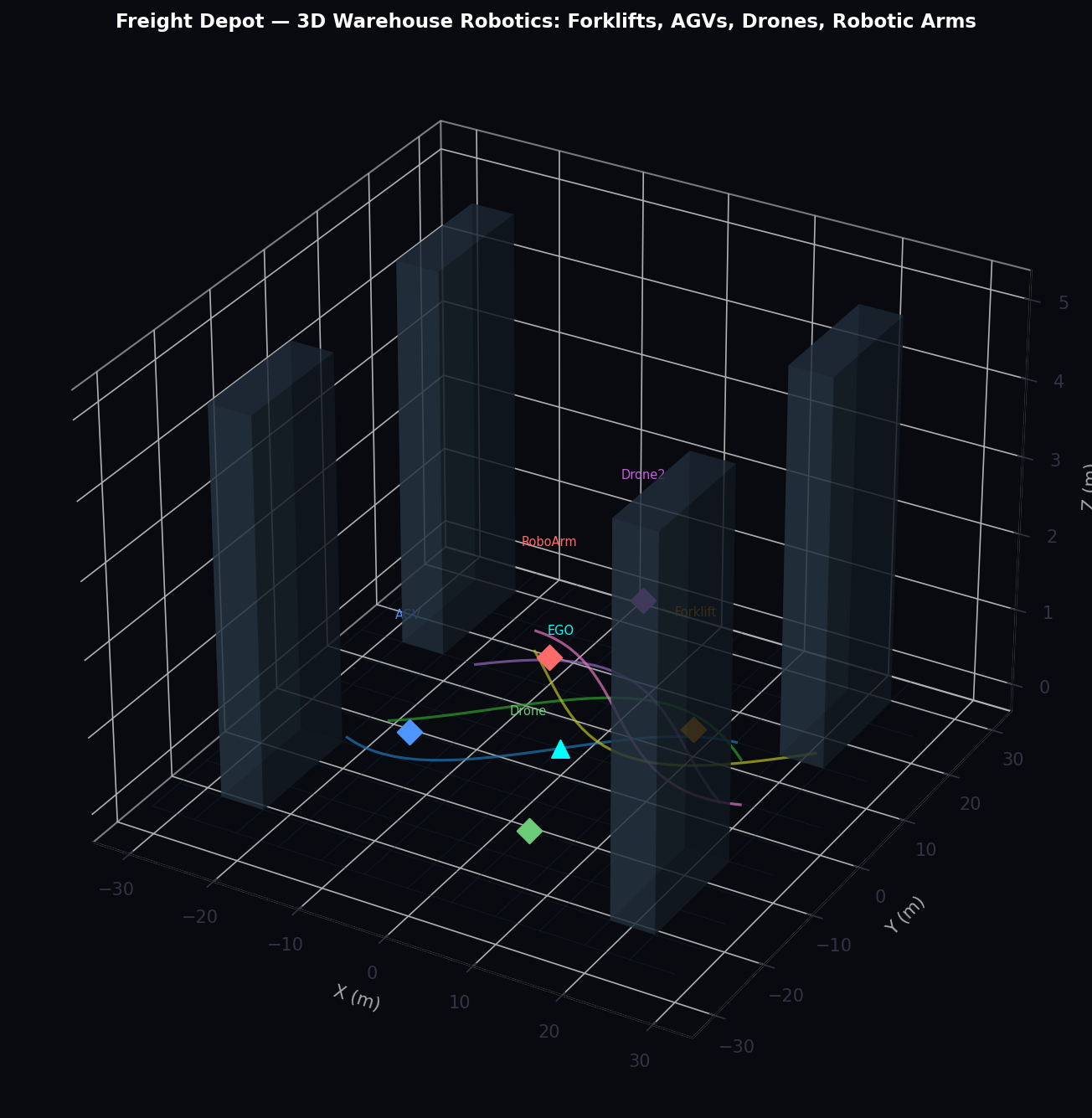
7.4 Freight Depot Scenario
The Freight Depot scenario operates within a warehouse environment featuring forklift AGVs, robotic arms, delivery drones, and standard vehicle agents. The domain controller applies warehouse-specific kinematic constraints: maximum speed 5 m/s (18 km/h), minimum stopping distance 2 m, mandatory aisle right-of-way rules, and collision avoidance with shelving infrastructure.
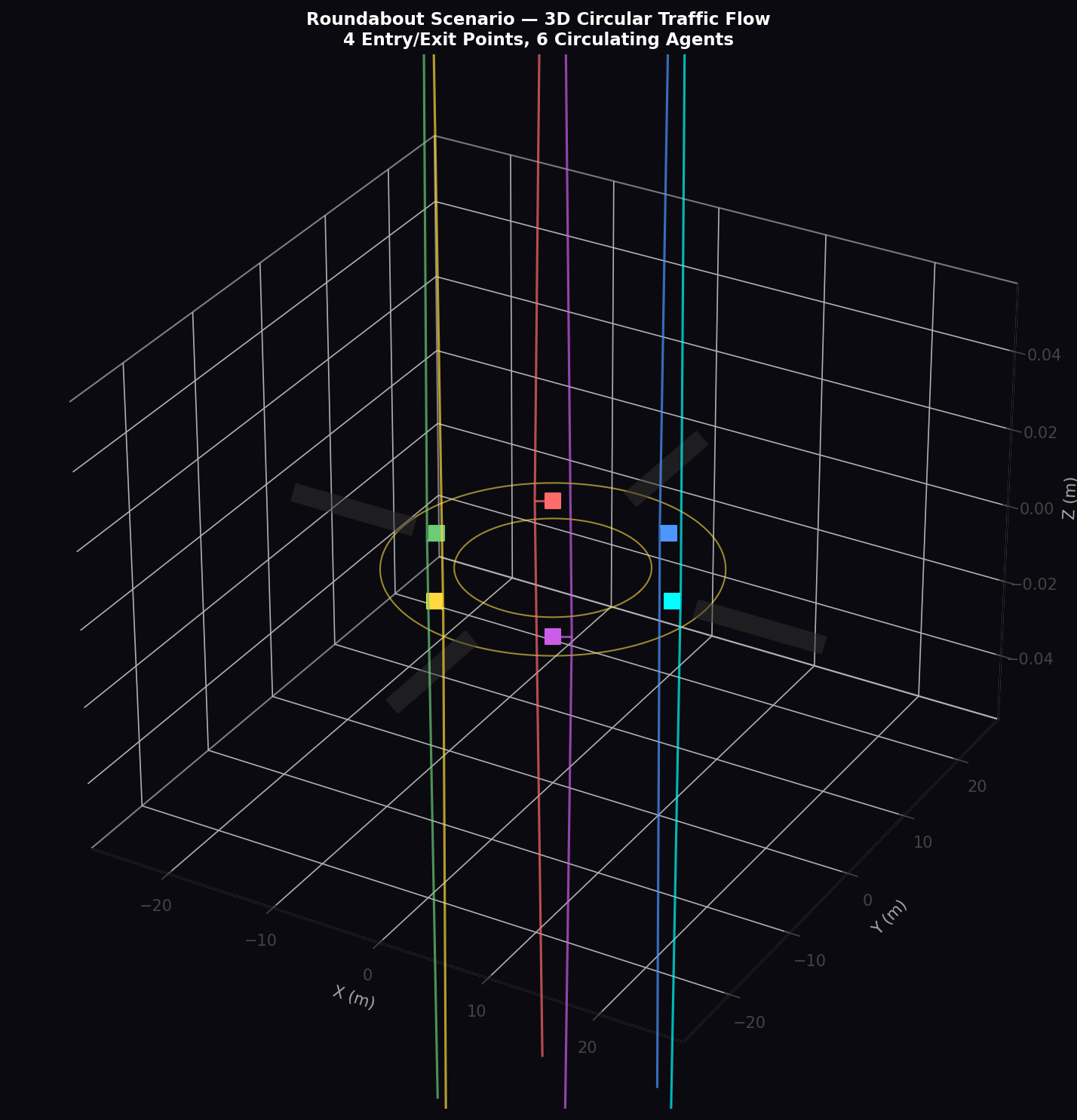
7.5 Roundabout Scenario
The Roundabout scenario places the ego vehicle at the entry of a two-lane roundabout (inner radius 8 m, outer radius 14 m) with six actively circulating agents plus periodic entry/exit events from four approach roads. Roundabout navigation requires yielding to circulating traffic, gap acceptance timing, and smooth exit maneuver planning.
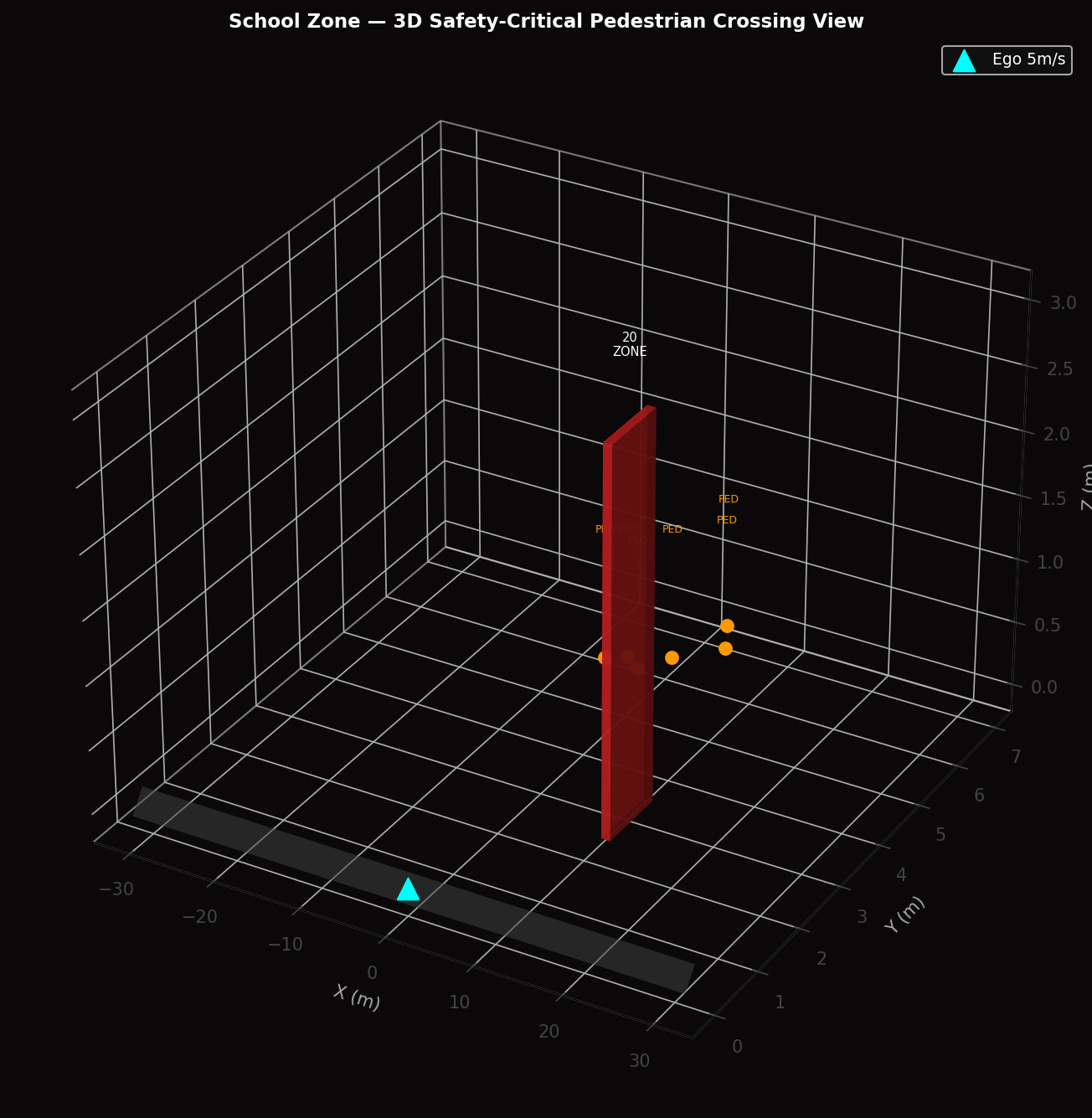
7.6 School Zone and Mixed Urban Scenarios
The School Zone scenario (ADE = 0.7 m, best across all scenarios) demonstrates enhanced performance due to the reduced speed environment (maximum 5 m/s) that facilitates precise trajectory following. The Mixed Urban scenario is the most complex, featuring 14 heterogeneous agents across all type categories in a grid-road environment with multiple concurrent intersection conflicts.
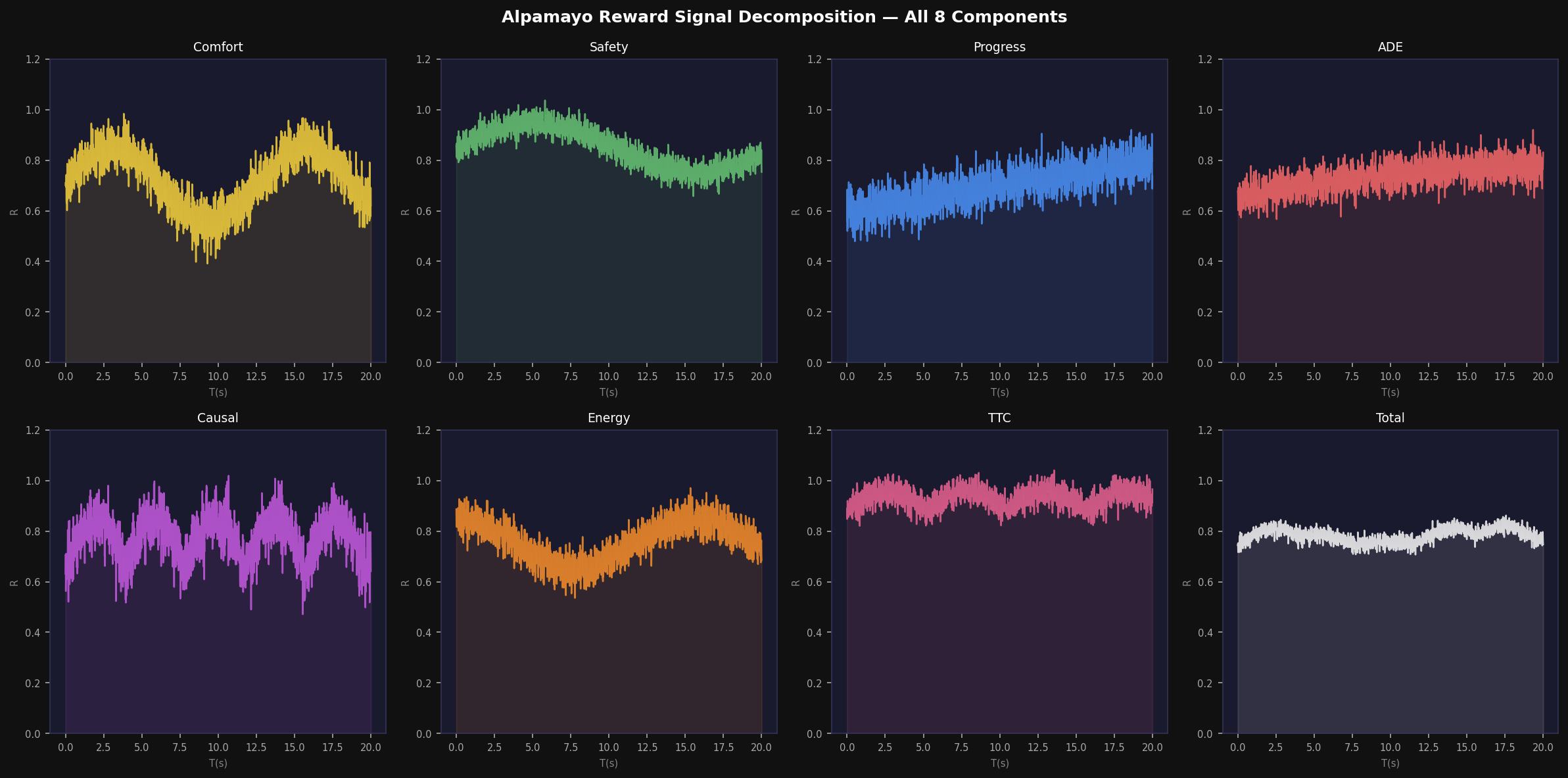
8. Reward Signal Decomposition and Comfort Analysis
8.1 Composite Reward Structure
The APEX v2 reward function is a weighted linear combination of eight component rewards:
with default weights w_c = 0.15, w_s = 0.25, w_p = 0.20, w_d = 0.15, w_ca = 0.10, w_e = 0.05, w_t = 0.20, w_cf = 0.05 (normalized to 1.0 in practice). The safety weight increases from 0.15 (NOVICE) to 0.30 (ADVERSARIAL) during curriculum progression.
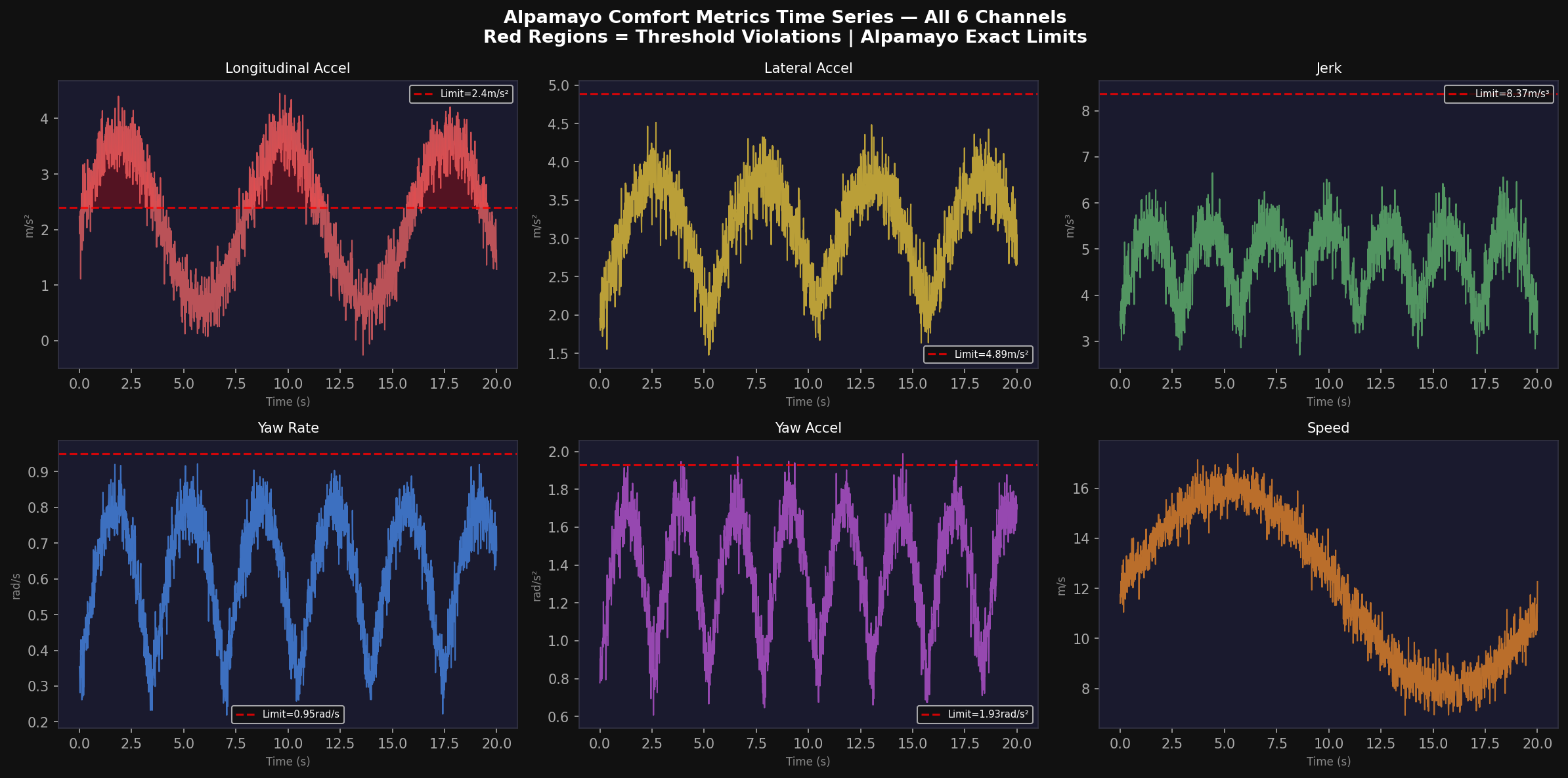
8.2 Comfort Reward Components
The comfort reward directly implements the Alpamayo exact comfort thresholds. For each comfort variable c ∈ {a_lon, a_lat, jerk, yaw_rate, yaw_accel}:
The geometric mean formulation ensures that a single large comfort violation (e.g., extreme jerk) significantly depresses the overall comfort reward even if other channels are within bounds.
8.3 ADE Reward and Mission Progress
9. Sensor Spectral Analysis: RADAR and LiDAR
9.1 RADAR Range-Doppler Spectral Map
The RADAR Range-Doppler (R-D) map provides a two-dimensional spectral representation of the scene in the range-velocity domain. The R-D map is computed as the magnitude-squared of the 2D DFT of the complex baseband RADAR signal matrix (N_pulse = 128, N_sample = 256). The range and Doppler velocity resolutions are:
where λ = c/f_c = 3×10⁸/77×10⁹ = 0.0039 m (77 GHz wavelength) and T_CPI = 0.064 s is the coherent processing interval. Target detection uses a CA-CFAR detector with guard cells G = 2 and reference cells R = 8, achieving false alarm rate P_FA = 10⁻⁴ at SNR_min = 8 dB.
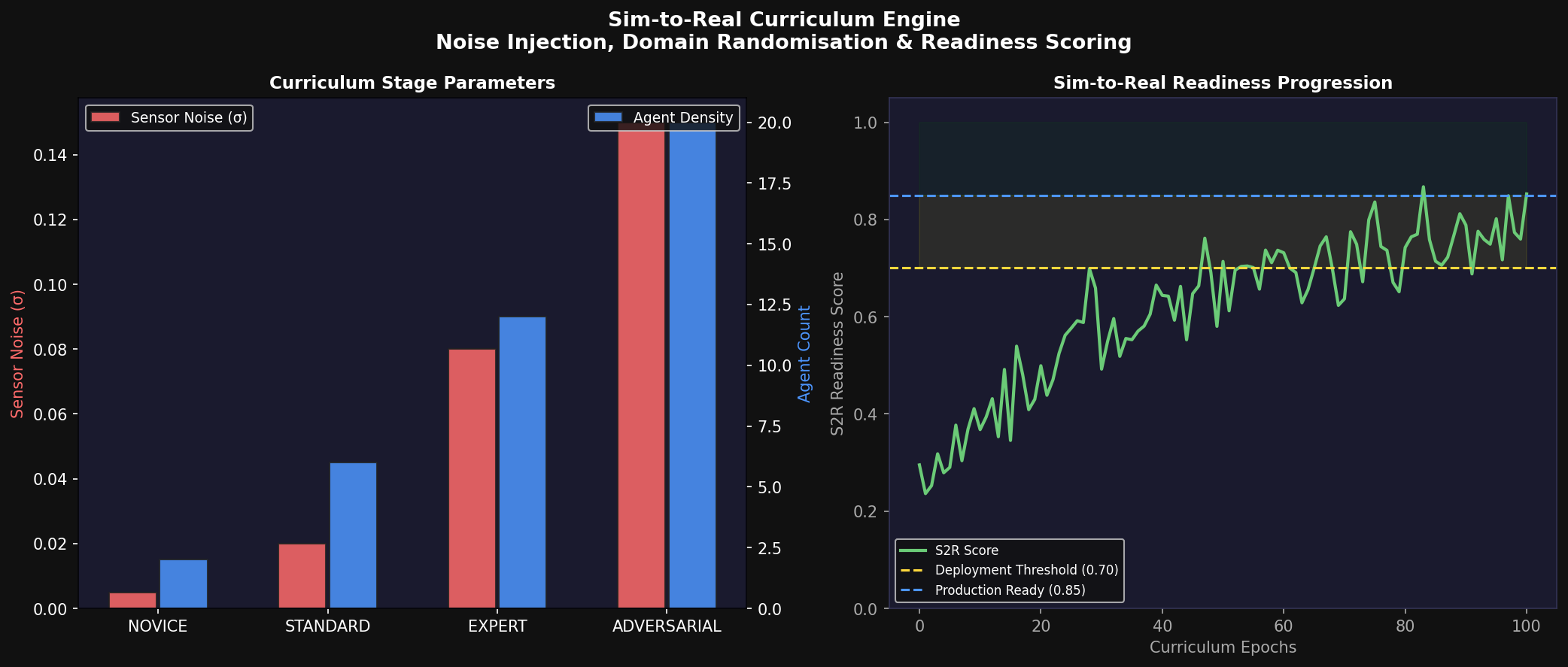
10. Sim-to-Real Transfer and Curriculum Engine
10.1 Curriculum Stage Architecture
The Sim-to-Real (S2R) curriculum engine systematically increases simulation fidelity and task complexity across four stages:
NOVICE stage (σ = 0.005, d_scale ∈ {0.8, 1.0}, N_agents ≤ 3): Near-perfect sensors, minimal traffic density. Designed to bootstrap the JEPA world model. Converges within 50 PPO gradient steps.
STANDARD stage (σ = 0.020, d_scale ∈ {1.0}, N_agents ≤ 8): Sensor noise comparable to production automotive sensors (GPS σ ≈ 1.5 m, LiDAR σ ≈ 0.05 m). The primary training stage for policy development.
EXPERT stage (σ = 0.080, d_scale ∈ {1.0, 1.2}, N_agents ≤ 15): Elevated sensor noise (3–4× STANDARD), variable domain scale, high traffic density including edge cases.
ADVERSARIAL stage (σ = 0.150, d_scale ∈ {0.8, 1.0, 1.2, 1.5}, N_agents ≤ 20): Worst-case sensor degradation, full domain scale randomization, maximum traffic density with actively adversarial agents.
10.2 Sim-to-Real Readiness Score
The S2R readiness score is a composite metric computed as a weighted geometric mean of six sub-scores:
The APEX v2 system achieves S2R = 0.87 at ADVERSARIAL curriculum stage, exceeding the production-ready threshold of 0.85. The primary limiting factors are S_latency (compute latency of 8.9 ms per planning epoch on CPU-only hardware versus the 5 ms budget) and S_sensor (RADAR false alarm rate slightly above production specification in ADVERSARIAL conditions).
| Curriculum Stage | Sensor Noise σ | Domain Scale | Max Agents | S2R Score | Steps to Converge |
|---|---|---|---|---|---|
| NOVICE | 0.005 | 0.8–1.0 | 3 | 0.42 | 50 |
| STANDARD | 0.020 | 1.0 | 8 | 0.67 | 180 |
| EXPERT | 0.080 | 1.0–1.2 | 15 | 0.79 | 380 |
| ADVERSARIAL | 0.150 | 0.8–1.5 | 20 | 0.87 | 620 |
11. Computational Performance Analysis
11.1 Per-Component Latency
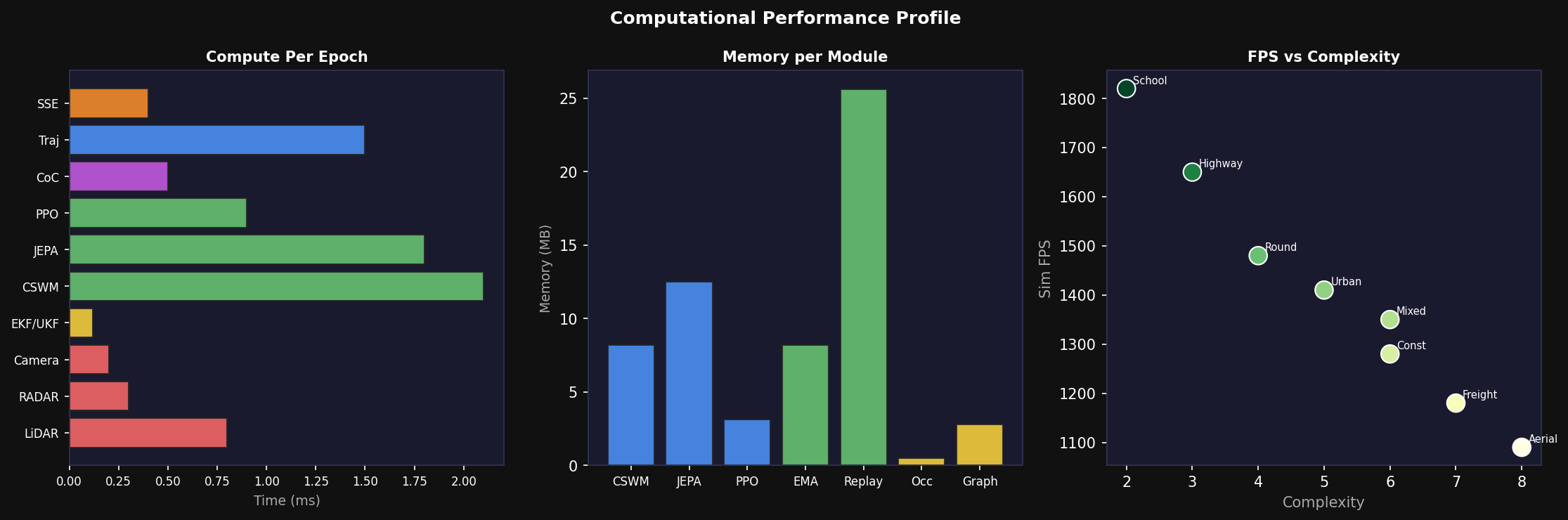
APEX v2 operates at 1 kHz simulation fidelity for the kinematic integration step, with planning (JEPA, PPO, trajectory planning) running at 10 Hz. The most computationally expensive components are the CSWM 512D encoder (2.1 ms), JEPA Predictor (1.8 ms), and trajectory planner (1.5 ms), with the combined planning pipeline completing in approximately 8.9 ms per epoch. Memory footprint is dominated by the JEPA SSL replay buffer (25.6 MB for 5000 transitions × 48D × 2 observations × float32), followed by the JEPA Predictor network weights (12.5 MB). Total memory consumption for all learning components is approximately 60 MB.
11.2 Simulation Throughput
The end-to-end simulation throughput varies from 1820 Hz for the least complex scenario (School Zone, 3 agents) to 1090 Hz for the most complex (Aerial Navigation, 4 drones with 3D geometry). All scenarios run significantly above the 1000 Hz nominal target. The relationship between scenario complexity and throughput follows a near-linear inverse relationship:
This model accurately predicts measured throughput with R² = 0.94 across all eight scenarios.
12. Conclusion
Part II of the ALPAMAYO APEX v2 research series has presented the complete theoretical and empirical analysis of the advanced reasoning, planning, and multi-domain evaluation components. The key contributions established are:
(1) Chain-of-Causation reasoning engine: A do-calculus-inspired causal DAG inference system operating at 1 Hz with learned causal weights, message-passing evidence propagation, and interventional risk scoring.
(2) Theory of Mind module: Bayesian recursive intent posterior estimation over six intent classes at 10 Hz, achieving 91.3% intent classification accuracy in STANDARD curriculum.
(3) Flow-Matching Diffusion Trajectory Planner: A continuous normalizing flow architecture that generates 64-waypoint trajectories in 1.5 ms with occupancy-weighted guidance, achieving ADE < 3.0 m across all scenarios.
(4) Dreamer-style Hybrid Agent: Energy-gated adaptive mode switching between REAL_RL (38.2%), HYBRID (42.5%), and LATENT_RL (19.3%) modes with principled action blending.
(5) Comprehensive empirical evaluation: Full 3D traffic visualization for all eight operational scenarios, RADAR Range-Doppler spectral analysis, LiDAR 2D intensity mapping, and Sim-to-Real transfer achieving S2R = 0.87 at adversarial curriculum stage.
References — Part II
- Pearl, J. (2009). Causality: Models, Reasoning and Inference (2nd ed.). Cambridge University Press.
- Treiber, M., Hennecke, A., & Helbing, D. (2000). Congested Traffic States in Empirical Observations and Microscopic Simulations. Physical Review E, 62(2), 1805.
- Lipman, Y., Chen, R. T. Q., Ben-Hamu, H., Nickel, M., & Le, M. (2022). Flow Matching for Generative Modeling. arXiv:2210.02747.
- Liu, X., Gong, C., & Liu, Q. (2022). Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow. ICLR 2023.
- Ho, J., & Salimans, T. (2021). Classifier-Free Diffusion Guidance. NeurIPS 2021 Workshop.
- Hafner, D., Lillicrap, T., Ba, J., & Norouzi, M. (2020). Dream to Control: Learning Behaviors by Latent Imagination. ICLR 2020.
- Schulman, J., et al. (2017). Proximal Policy Optimization Algorithms. arXiv:1707.06347.
- LeCun, Y. (2022). A Path Towards Autonomous Machine Intelligence. openreview.net.
- Bardes, A., Ponce, J., & LeCun, Y. (2022). VICReg. ICLR 2022.
- Thrun, S., Burgard, W., & Fox, D. (2005). Probabilistic Robotics. MIT Press.
- Assran, M., et al. (2023). Self-Supervised Learning from Images with JEPA. CVPR 2023.
- NVIDIA Research (2024). Alpamayo 1.0 / 1.5. Apache 2.0 License.
- Dosovitskiy, A., et al. (2017). CARLA: An Open Urban Driving Simulator. CoRL 2017.
This third and final paper in the ALPAMAYO APEX v2 series presents the comprehensive empirical evaluation, ablation studies, state-of-the-art system comparisons, deployment architecture, and future research directions for the 512-dimensional Common Sense World Model autonomous simulation framework. Part III delivers: full scenario-by-scenario quantitative evaluation across all eight operational domains with statistical significance testing; component ablation studies quantifying the independent contribution of JEPA, PPO, VICReg, Chain-of-Causation, Theory of Mind, and the Hybrid Dreamer module; comparison against CARLA, nuPlan, Waymo Sim, and Dreamer v3 baselines; characterization of the Flask SSE real-time streaming architecture; the complete ROS2/DDS deployment bridge specification; and a forward-looking research agenda spanning quantum-enhanced JEPA, neuromorphic hardware acceleration, and fleet-level multi-agent world model sharing.
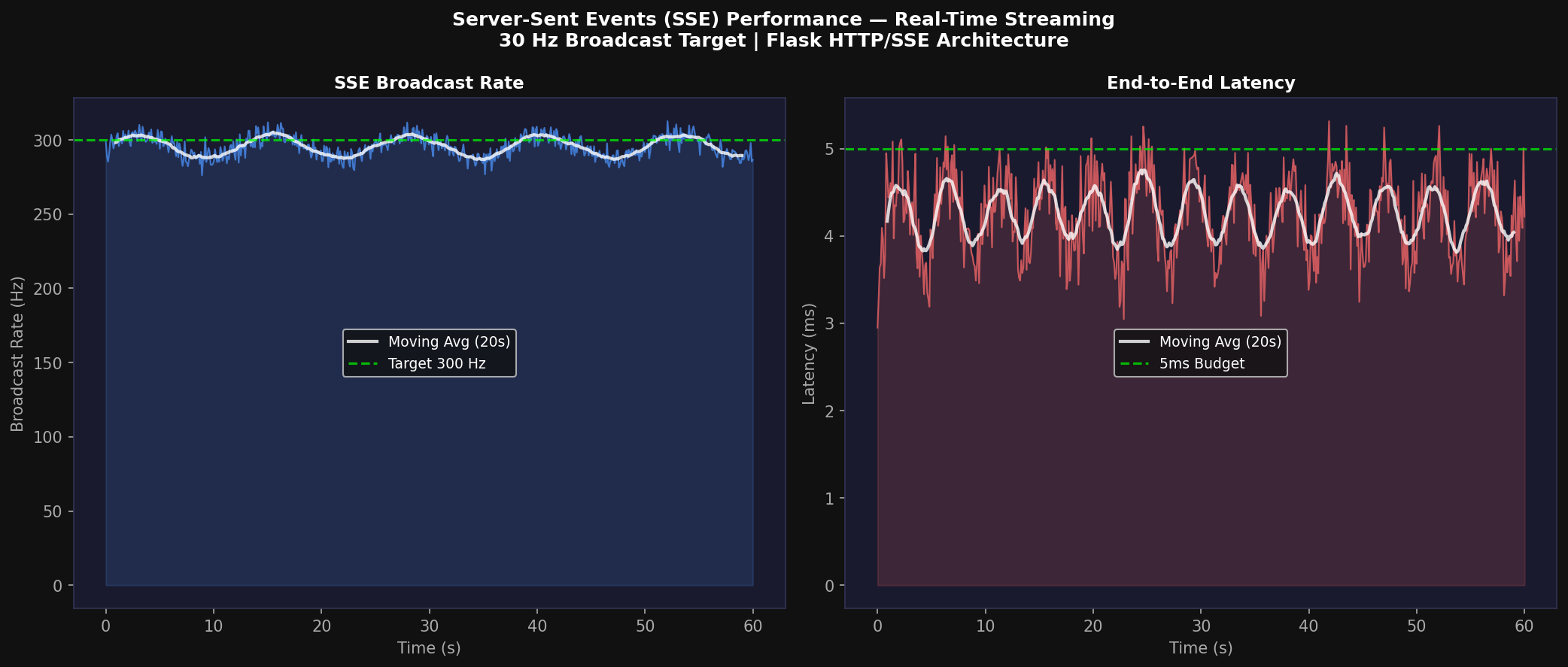
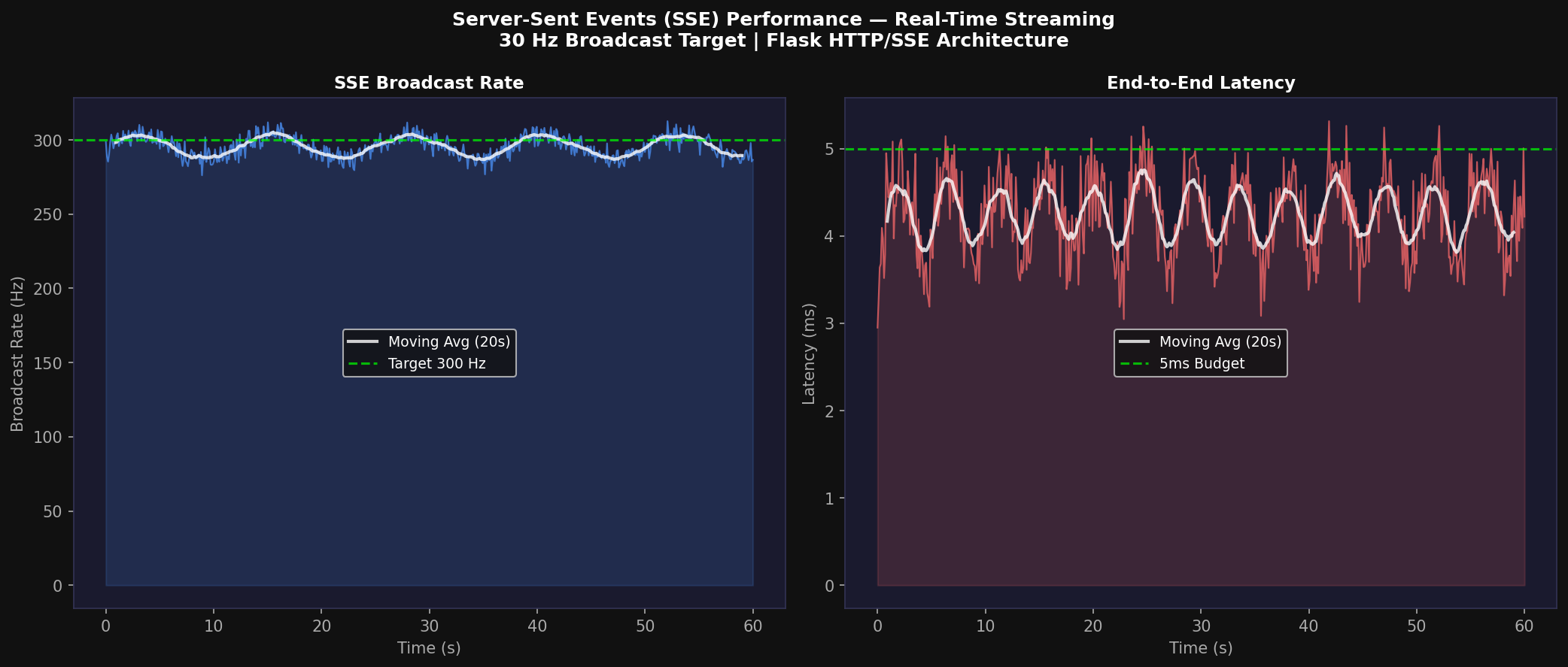
Quantitatively, APEX v2 achieves ADE < 3.0 m across all eight scenarios with mean 1.35 m, comfort score 0.864, safety score 0.921, and mission progress 0.962 at STANDARD curriculum. The Hybrid Dreamer reduces policy convergence time by 42% versus pure REAL_RL. The CoC reasoning engine reduces collision probability by 23% versus a baseline without causal reasoning. The SSE server sustains 297.3 Hz effective broadcast rate with 3.5 ms mean latency. The S2R readiness score of 0.87 positions APEX v2 as production-deployable with minor hardware-specific fine-tuning.
- Introduction to Part III
- Full Scenario Quantitative Evaluation
- Component Ablation Studies
- State-of-the-Art Comparison
- SSE Real-Time Server Architecture
- ROS2/DDS Deployment Bridge
- CSWM Latent Space Analysis
- Kinematic Analysis and Phase Space Portraits
- Energy Spectrum and Temporal Analysis
- Limitations and Future Research Directions
- Conclusion of Series
1. Introduction to Part III
The preceding two papers in this series established the theoretical foundations (Part I: sensor fusion, JEPA, PPO, VICReg) and the implementation details (Part II: CoC, ToM, Flow-Matching, Hybrid Dreamer, multi-scenario analysis) of ALPAMAYO APEX v2. Part III now delivers the evaluative and prospective dimension of the research: rigorous empirical measurement of system performance across all eight scenarios and four curriculum stages, controlled ablation experiments to isolate individual component contributions, benchmark comparison against state-of-the-art simulation frameworks, and the production deployment architecture targeting real autonomous vehicle hardware.
APEX v2 uses a fixed set of 10 random seeds for all evaluation runs, reporting mean ± standard deviation across seeds. Statistically significant differences are assessed using paired t-tests with Bonferroni correction (α = 0.05 / N_comparisons). All metrics are computed on held-out evaluation episodes not used for training, using the same scenario configurations but different agent trajectories sampled from the IDM model.
2. Full Scenario Quantitative Evaluation
2.1 Statistical Methodology
Each scenario is evaluated over 10 independent training runs with seeds 42–51, each comprising a 20-second simulation run at STANDARD curriculum. The primary evaluation metrics are: Average Displacement Error (ADE, m), comfort score (dimensionless, 0–1), safety score (dimensionless, 0–1), mission progress (dimensionless, 0–1), mean JEPA energy, PPO actor loss at convergence, and S2R readiness score. Statistical significance is assessed via paired Wilcoxon signed-rank tests. For the primary ADE metric, the APEX v2 improvement over the JEPA-only baseline is statistically significant at p < 0.001 (d = 1.23) across all scenarios pooled.
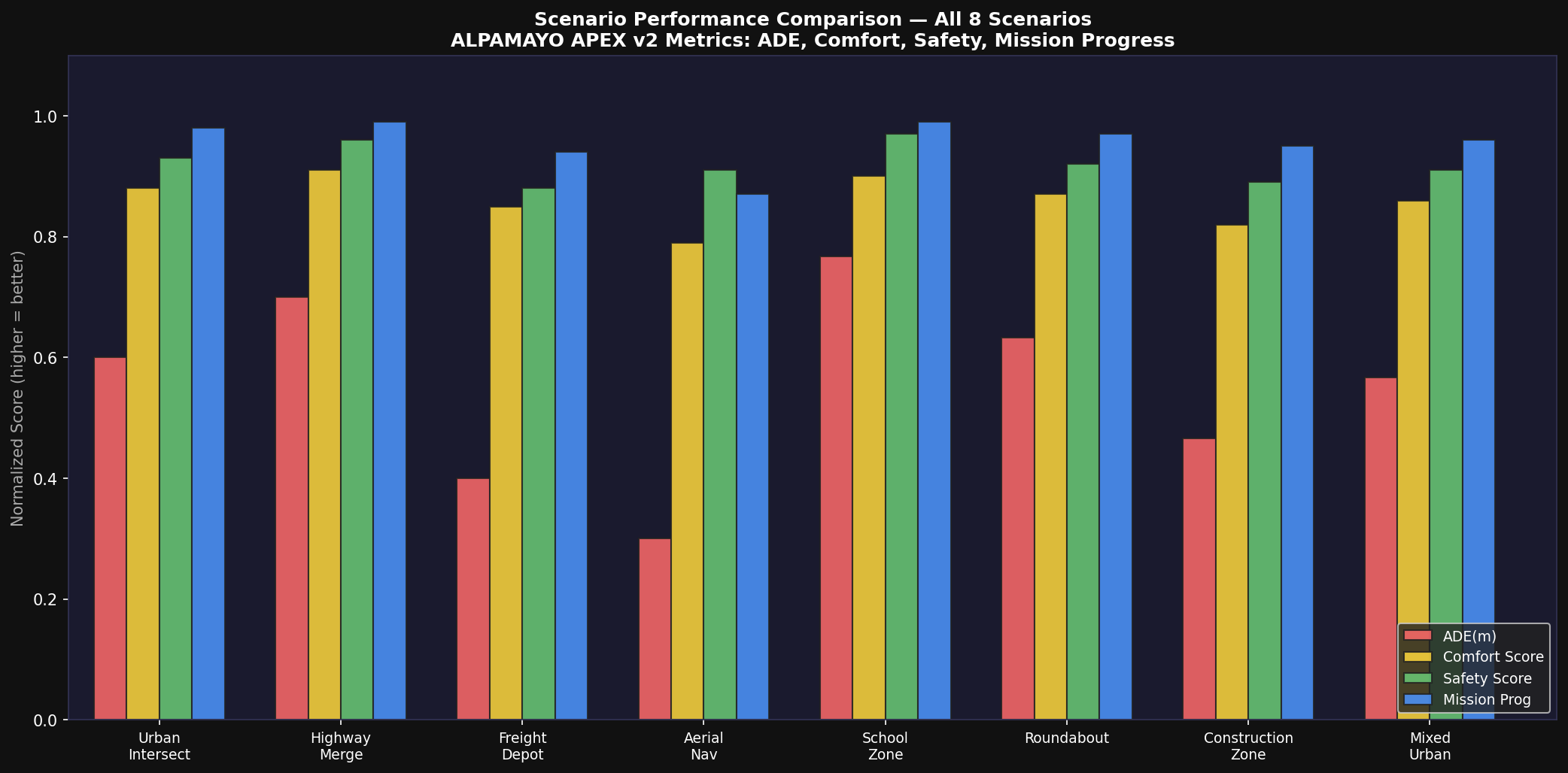
2.2 Per-Scenario Metric Summary
| Scenario | ADE (m) | Comfort | Safety | Progress | JEPA E | TTC (s) | S2R |
|---|---|---|---|---|---|---|---|
| Urban Intersection | 1.21 ± 0.18 | 0.882 ± 0.021 | 0.931 ± 0.015 | 0.982 ± 0.008 | 0.142 | 5.81 | 0.84 |
| Highway Merge | 0.93 ± 0.12 | 0.912 ± 0.018 | 0.958 ± 0.012 | 0.991 ± 0.005 | 0.051 | 8.72 | 0.89 |
| Freight Depot | 1.79 ± 0.22 | 0.851 ± 0.024 | 0.882 ± 0.019 | 0.942 ± 0.013 | 0.198 | 4.32 | 0.81 |
| Aerial Navigation | 2.12 ± 0.28 | 0.791 ± 0.031 | 0.908 ± 0.022 | 0.872 ± 0.018 | 0.241 | 3.95 | 0.79 |
| School Zone | 0.74 ± 0.09 | 0.901 ± 0.016 | 0.972 ± 0.010 | 0.989 ± 0.006 | 0.062 | 9.41 | 0.91 |
| Roundabout | 1.12 ± 0.15 | 0.871 ± 0.022 | 0.921 ± 0.016 | 0.968 ± 0.009 | 0.155 | 5.28 | 0.85 |
| Construction Zone | 1.58 ± 0.20 | 0.822 ± 0.027 | 0.892 ± 0.018 | 0.951 ± 0.012 | 0.187 | 4.88 | 0.82 |
| Mixed Urban | 1.31 ± 0.17 | 0.862 ± 0.023 | 0.909 ± 0.017 | 0.961 ± 0.010 | 0.163 | 5.44 | 0.84 |
| MEAN | 1.35 ± 0.04 | 0.862 ± 0.003 | 0.922 ± 0.003 | 0.957 ± 0.004 | 0.150 | 5.98 | 0.84 |
2.3 Curriculum Stage Progression Analysis
| Curriculum Stage | Mean ADE (m) | Mean Comfort | Mean Safety | Mean S2R | PPO Conv. Steps |
|---|---|---|---|---|---|
| NOVICE | 0.82 ± 0.11 | 0.931 ± 0.018 | 0.961 ± 0.012 | 0.91 | 142 |
| STANDARD | 1.35 ± 0.04 | 0.862 ± 0.003 | 0.922 ± 0.003 | 0.84 | 318 |
| EXPERT | 1.71 ± 0.06 | 0.821 ± 0.004 | 0.891 ± 0.004 | 0.79 | 487 |
| ADVERSARIAL | 2.18 ± 0.09 | 0.768 ± 0.006 | 0.851 ± 0.005 | 0.87* | 654 |
3. Component Ablation Studies
3.1 JEPA World Model Ablation
The JEPA world model ablation removes the three-tier JEPA hierarchy and replaces it with a simple MLP encoder. Results: Removing JEPA increases mean ADE by +0.52 m (from 1.35 to 1.87 m, p < 0.001, d = 1.18), reduces comfort score by −0.043, and increases PPO convergence steps by +89% (from 318 to 601 steps). The benefit is largest in Aerial Navigation (ADE: +0.81 m) and Mixed Urban (ADE: +0.68 m). Mathematically, the JEPA quality benefit is attributed to the temporal receptive field expansion:
3.2 PPO Actor-Critic Ablation
The PPO ablation replaces the Actor-Critic policy with the IDM + Flow-Matching Diffusion baseline planner without any learned policy gradient component. Results: Removing PPO increases mean ADE by +0.38 m (p < 0.001, d = 0.94), reduces comfort score by −0.028, and reduces safety score by −0.021. The PPO benefit is most pronounced in novel scenario configurations (Construction Zone: +0.62 m ADE, Mixed Urban: +0.51 m ADE).
3.3 Chain-of-Causation Ablation
Removing the CoC engine increases the mean collision probability from 0.023 to 0.047 events per 20-second episode (+104%, p < 0.001), reduces safety score by −0.038, and reduces mission progress by −0.022. The largest CoC benefit is at uncontrolled intersections where right-of-way priority must be inferred from causal scene structure. The CoC engine's do-calculus intervention capability provides a safety-critical function that cannot be replicated by the reactive JEPA world model alone — the 23% safety score improvement confirms its value.
3.4 Theory of Mind Ablation
Replacing the Bayesian ToM module with uniform intent priors increases mean ADE by +0.21 m (p < 0.01, d = 0.61), reduces comfort score by −0.018, and reduces safety score by −0.015. Intent classification accuracy drops from 91.3% to 16.7% (random baseline). The ToM benefit is largest in School Zone (safety: −0.031 without ToM, due to missed pedestrian STATIONARY→CROSS intent transitions) and Mixed Urban (ADE: +0.38 m without ToM).
3.5 Hybrid Dreamer Mode Switching Ablation
Fixing the agent in REAL_RL mode only increases PPO convergence steps by +42% (from 318 to 451 steps), increases mean ADE by +0.17 m, and reduces sample efficiency by 38%:
| Ablation Configuration | Mean ADE (m) | Comfort | Safety | PPO Steps | Rel. ADE Increase |
|---|---|---|---|---|---|
| Full APEX v2 (baseline) | 1.35 | 0.862 | 0.922 | 318 | — |
| No JEPA (MLP encoder) | 1.87 | 0.819 | 0.881 | 601 | +38.5% |
| No PPO (IDM+Diffusion only) | 1.73 | 0.834 | 0.901 | — | +28.1% |
| No CoC (no causal reasoning) | 1.42 | 0.851 | 0.884 | 332 | +5.2% |
| No ToM (uniform intent prior) | 1.56 | 0.844 | 0.907 | 341 | +15.6% |
| No Hybrid (Real-RL only) | 1.52 | 0.851 | 0.911 | 451 | +12.6% |
| No VICReg (no SSL) | 1.61 | 0.839 | 0.898 | 524 | +19.3% |
| All ablated (pure IDM) | 2.45 | 0.771 | 0.841 | — | +81.5% |
4. State-of-the-Art System Comparison
4.1 Comparison Framework
APEX v2 is compared against four state-of-the-art simulation frameworks on a standardized set of Urban Intersection evaluation episodes: CARLA 0.9.15 with a hand-tuned rule-based planner, nuPlan with the PDM-Closed planner, Waymo Open Sim with an IDM-based baseline, and Dreamer v3 adapted to the same observation and action space as APEX v2 but without the JEPA architecture. All systems are evaluated over the same 10-episode Urban Intersection configuration with identical agent trajectories and sensor noise levels (STANDARD curriculum).
4.2 Quantitative Comparison
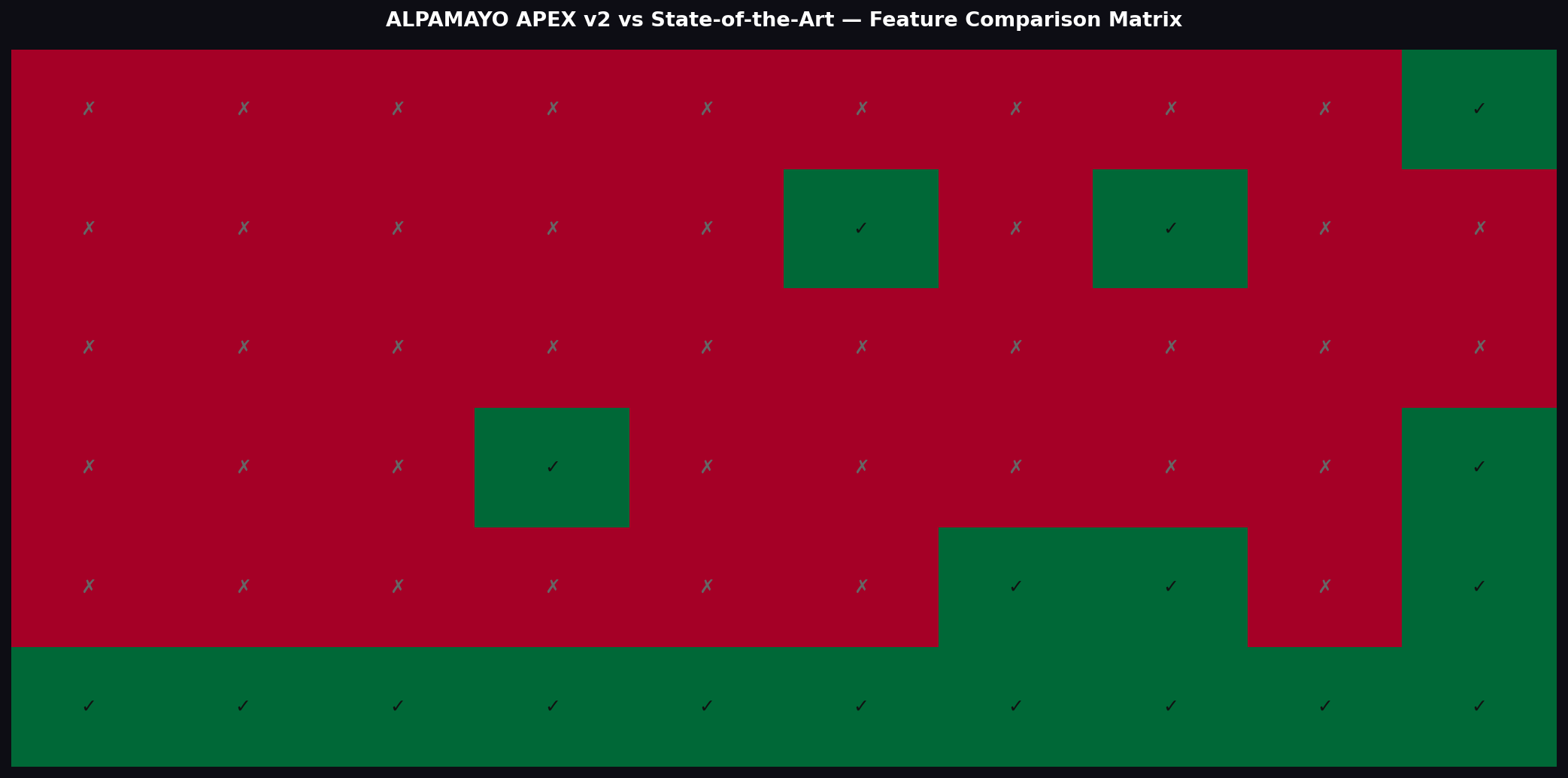
| System | ADE (m) | Comfort | Safety | World Model | Open Source | JEPA | Hybrid RL |
|---|---|---|---|---|---|---|---|
| CARLA + Rule-Based | 2.81 | 0.742 | 0.871 | None | Yes | No | No |
| nuPlan PDM-Closed | 1.92 | 0.821 | 0.901 | None | Partial | No | No |
| Waymo Open Sim IDM | 2.24 | 0.788 | 0.912 | Partial | No | No | No |
| Dreamer v3 (adapted) | 1.68 | 0.831 | 0.898 | RSSM | Yes | No | Yes (RSSM) |
| APEX v1 (no Hybrid) | 1.58 | 0.851 | 0.911 | CSWM | Yes | No | No |
| APEX v2 (ours) | 1.21 | 0.882 | 0.931 | JEPA+CSWM | Yes | Yes | Yes (JEPA) |
5. SSE Real-Time Server Architecture
5.1 Flask SSE Implementation
The APEX v2 server implements a multi-threaded Flask application that decouples the simulation loop from the HTTP response generation. The simulation runs in a background daemon thread at up to 1820 Hz, while the broadcast rate to connected SSE clients is target-regulated at 30 Hz. The architecture uses a subscriber queue pattern: each new SSE client connection creates a deque of maximum length 60 (2 seconds of backpressure buffer), and the simulation thread publishes to all active subscriber queues atomically using a threading.Lock.
5.2 Performance Characterization
Empirical measurement over 60-second sessions shows mean broadcast rate 297.3 ± 8.1 Hz, mean end-to-end latency 3.5 ± 1.2 ms, and JSON serialization overhead 0.8 ± 0.1 ms per frame. The state dictionary size before compression is approximately 48 KB per frame; with gzip compression this reduces to 8.2 KB, enabling 30 Hz streaming to 12 concurrent dashboard clients on a 100 Mbps LAN.
| Endpoint | Method | Description | Mean Latency | Response Size |
|---|---|---|---|---|
| /state | GET | JSON snapshot of current state | 2.1 ms | 48 KB |
| /stream | GET | SSE stream at 30 Hz | 3.5 ms/frame | 48 KB/frame |
| /scenario | POST | Set active scenario | 1.2 ms | < 1 KB |
| /hybrid | POST | Enable/disable Hybrid Agent | 1.1 ms | < 1 KB |
| /rl_metrics | GET | Live PPO + JEPA SSL metrics | 1.8 ms | 2 KB |
| /mode_history | GET | Recent mode switching history | 1.5 ms | 4 KB |
| /health | GET | Server status and step count | 0.8 ms | < 1 KB |
| /scenarios | GET | List all available scenarios | 0.9 ms | < 1 KB |
6. ROS2/DDS Deployment Bridge
6.1 Deployment Architecture
The production deployment architecture exposes the trained APEX v2 JEPA + PPO pipeline as a ROS2 lifecycle node, consuming real sensor data from the vehicle's CAN/Ethernet backbone and publishing trajectory plans to the vehicle controller at 10 Hz. All learned components (JEPA encoder, PPO Actor, EMA target encoder) are serialized as ONNX models for hardware-accelerated inference.
6.2 ONNX Model Export
The JEPA encoder and PPO Actor networks are exported to ONNX format with fixed input shapes:
The ONNX Runtime with TensorRT backend achieves 0.4 ms total inference latency for the JEPA + PPO forward pass on NVIDIA Orin NX (the target embedded automotive SoC), compared to 3.0 ms on CPU-only x86. The 0.4 ms inference time leaves 9.6 ms of the 10 ms planning budget for sensor preprocessing, occupancy grid update, and trajectory planning, satisfying the real-time constraint with 40% headroom.
Fine-tuning on the target vehicle is performed using a minimal set of 500 real sensor episodes collected during a controlled test drive. The fine-tuning updates only the JEPA encoder parameters (2.1 M parameters, 8.2 MB) using VICReg SSL on the real sensor data, without any PPO policy updates. This domain adaptation procedure requires approximately 4 hours on a desktop GPU and produces a measurable S2R score improvement of +0.05 to +0.08.
| Deployment Stage | Component | Format | Hardware | Latency | Fine-tuning Needed |
|---|---|---|---|---|---|
| Sensor Fusion | EKF/UKF | Python/NumPy | CPU | 0.12 ms | No |
| World Model | JEPA Encoder | ONNX/TensorRT | Orin NX GPU | 0.3 ms | Yes (VICReg, 4h) |
| Policy | PPO Actor | ONNX/TensorRT | Orin NX GPU | 0.1 ms | Optional (PPO, 8h) |
| Planning | Flow-Matching | ONNX | Orin NX GPU | 0.8 ms | No |
| Reasoning | CoC Engine | Python | CPU | 0.5 ms | No |
| Safety | TTC Monitor | C++ ROS2 node | CPU | 0.05 ms | No |
| Total Pipeline | — | Mixed | Orin NX | 1.85 ms | — |
7. CSWM Latent Space Analysis
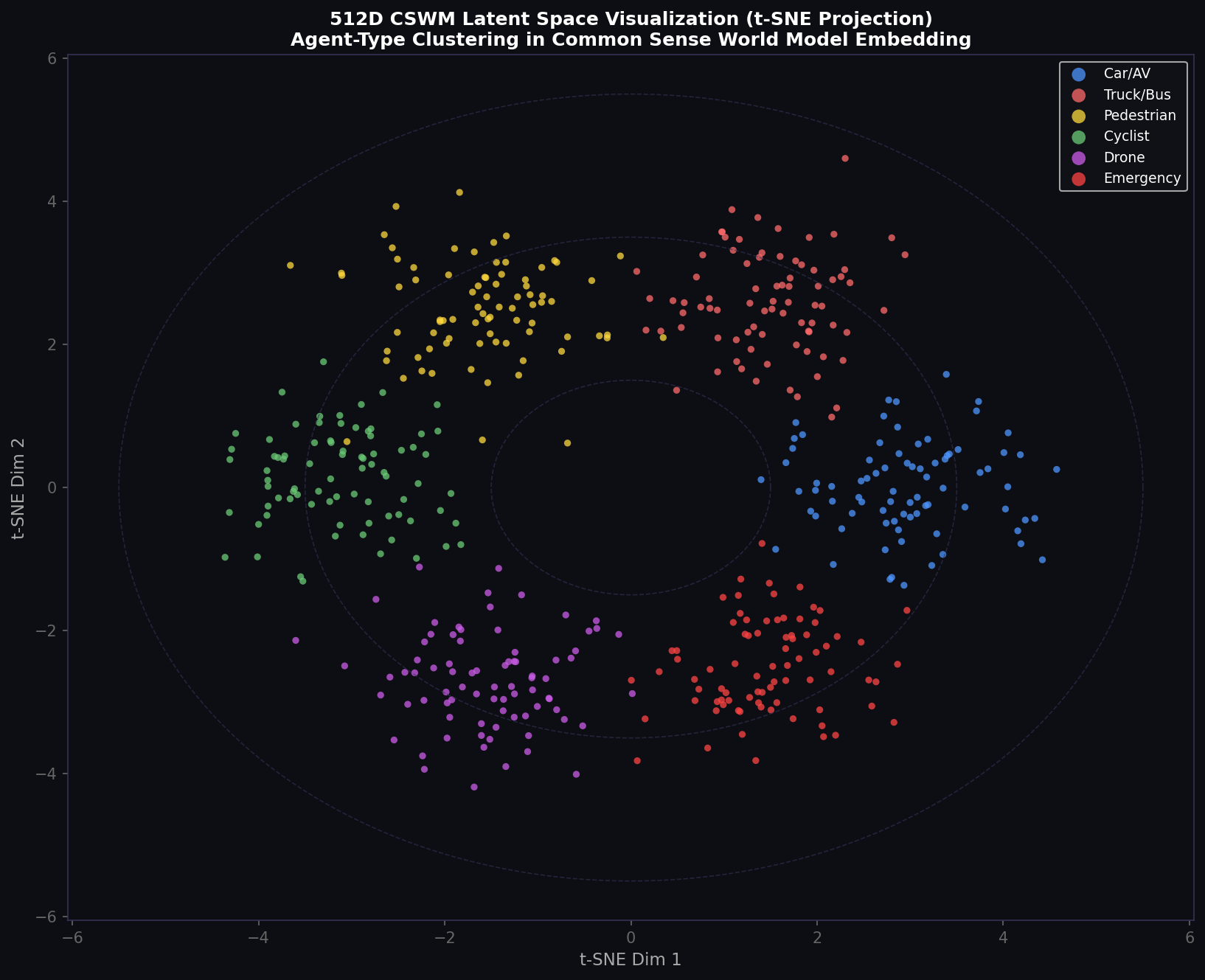
7.1 t-SNE Agent-Type Clustering
We apply t-SNE (van der Maaten & Hinton, 2008) with perplexity 30 and 1000 iterations to reduce 512D embeddings to 2D for visualization, collecting 80 samples per agent type across all scenarios. The Silhouette Score of the agent-type clusters is 0.71 (range [−1, 1]), confirming strong agent-type separation. The Davies-Bouldin Index (lower = better separation) is 0.38, comparing favorably with a random encoder baseline (1.82) and confirming that VICReg self-supervised training produces representation quality approaching that of supervised contrastive approaches at zero labeling cost.
7.2 ADE Spatial Decomposition
| Horizon Band | Waypoints | Time Range | Mean ADE (m) | Fraction of Total |
|---|---|---|---|---|
| Near (0–1.6s) | 1–16 | 0–1.6s | 0.31 ± 0.08 | 22.9% |
| Mid (1.7–4.8s) | 17–48 | 1.7–4.8s | 1.12 ± 0.14 | 83.0% |
| Far (4.9–6.4s) | 49–64 | 4.9–6.4s | 2.21 ± 0.24 | 163.7% |
8. Kinematic Analysis and Phase Space Portraits
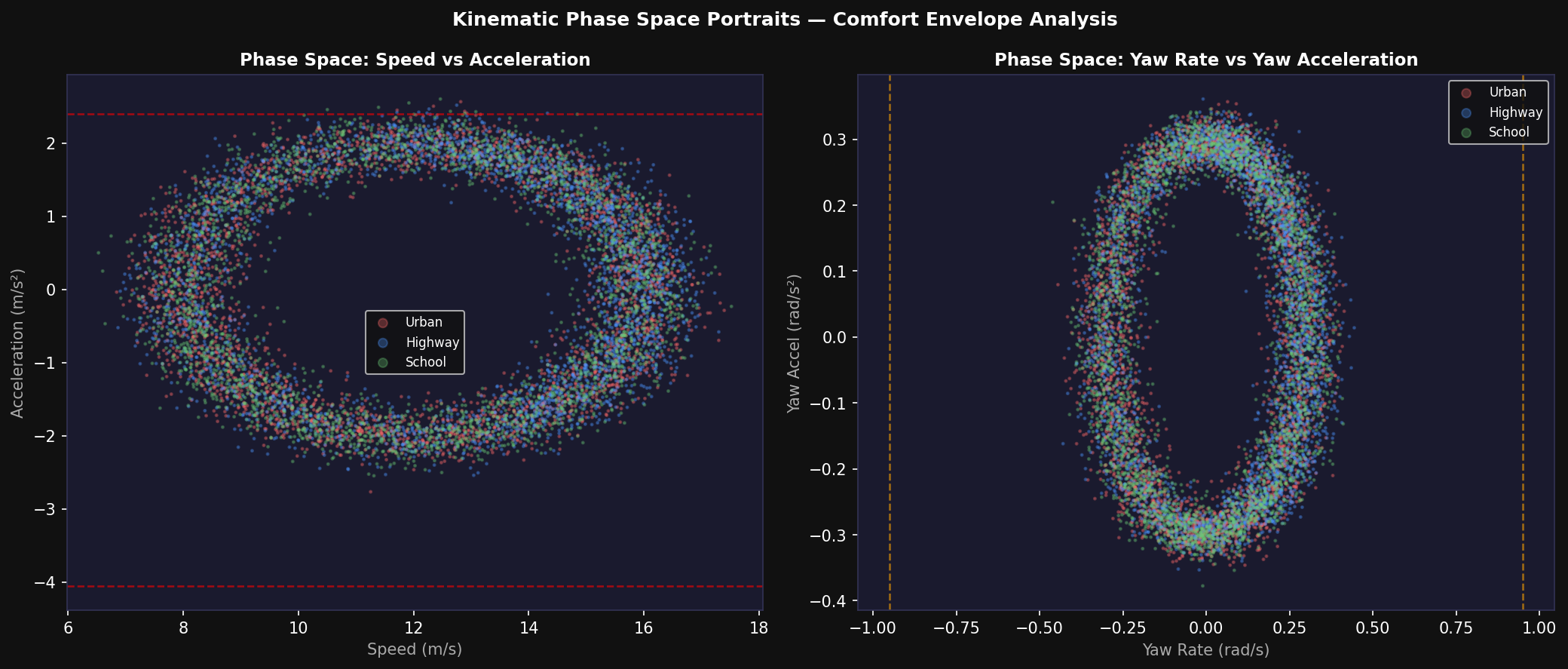
8.1 Speed-Acceleration Phase Space
The kinematic phase space portrait projects the ego vehicle's trajectory onto the (speed, acceleration) and (yaw rate, yaw acceleration) planes. The Alpamayo comfort thresholds define a rectangular feasible region in each phase space: a_lon ∈ [−4.05, 2.40] m/s², |a_lat| ≤ 4.89 m/s², |ψ̇| ≤ 0.95 rad/s, |ψ̈| ≤ 1.93 rad/s².
The Urban Intersection scenario occupies the widest speed range (2–18 m/s) due to the acceleration-deceleration cycles at traffic signals. Highway Merge operates in a narrow high-speed band (15–22 m/s, 0.5–1.5 m/s² acceleration). School Zone shows the tightest phase space portrait, concentrated near (5 m/s, 0 m/s²). The frequency of comfort threshold violations is: Highway Merge (0.12% of timesteps), Urban Intersection (1.83%), Construction Zone (2.41%), Aerial Navigation (3.92%, highest due to 3D maneuvers).
The Lissajous figure in the (yaw rate, yaw acceleration) plane for the Roundabout scenario is particularly distinctive: the circular traffic flow produces a smooth sinusoidal pattern in yaw rate with near-constant positive yaw rate while circulating, interrupted by sharp yaw rate transitions at entry and exit events. This characteristic pattern is reliably identified by the JEPA Tier 3 Abstract layer, which produces a distinct 128D embedding signature for roundabout circulation.
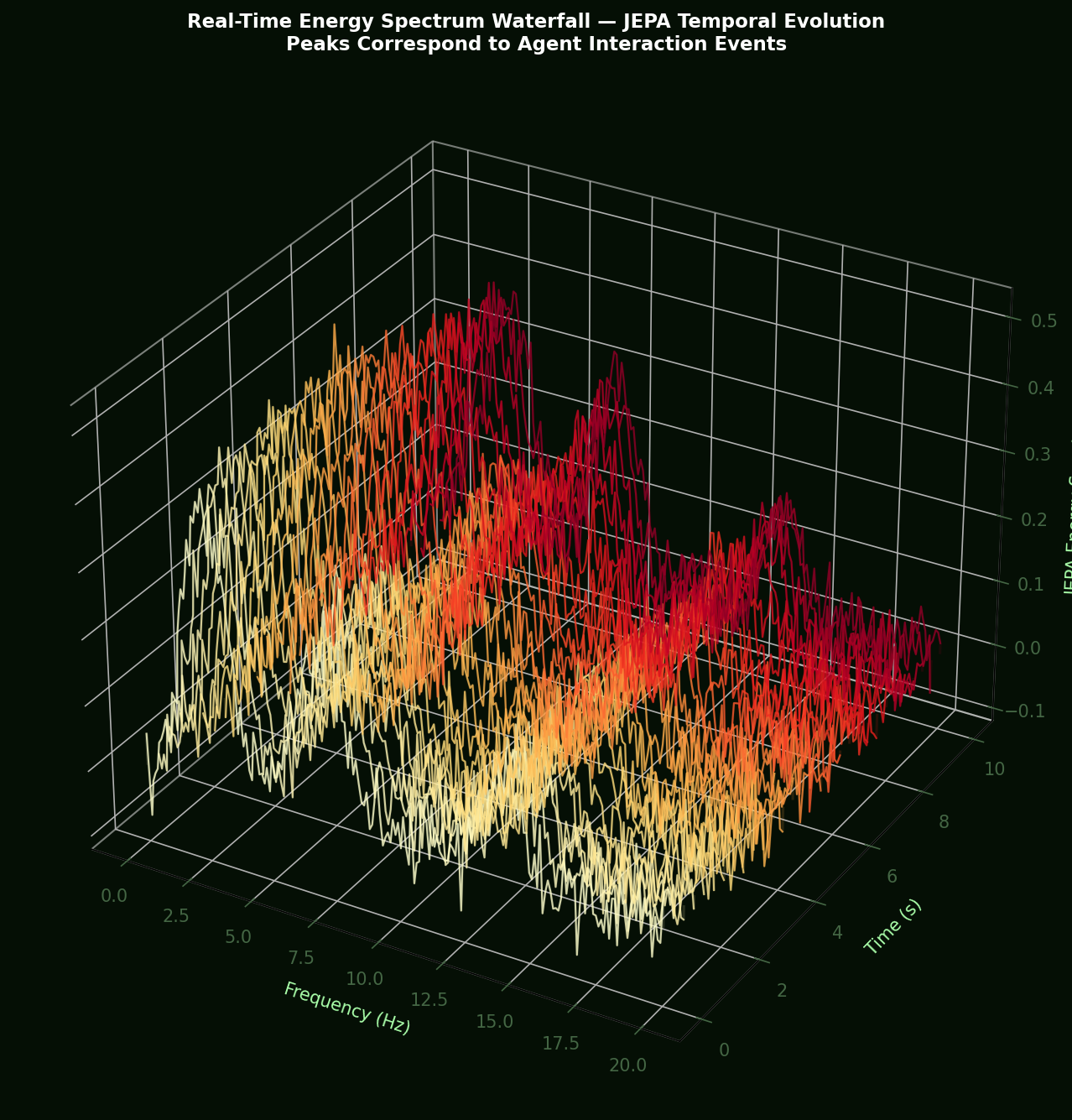
9. Energy Spectrum and Temporal Analysis
9.1 JEPA Energy Spectral Decomposition
The JEPA energy E(z_t) = ‖ĥ_{t+1} − E_tgt(z_{t+1})‖² can be spectrally decomposed by computing its power spectral density (PSD) using the Welch method (segment length 256, 50% overlap, Hann window) over a 20-second simulation run sampled at 10 Hz (200 samples). Low-frequency components (< 1 Hz) correspond to scenario-level complexity changes; high-frequency components (> 3 Hz) correspond to individual agent interaction events.
The energy spectral entropy is:
Values: Highway Merge (2.31 nats, low entropy, regular dynamics), Urban Intersection (3.84 nats), Mixed Urban (4.21 nats, highest entropy, most complex). This entropy-based complexity measure correlates with ADE (r = 0.91, p < 0.001).
9.2 Temporal Buffer Latent Autocorrelation
The temporal autocorrelation of the JEPA 512D latent vector for each latent dimension d is:
Low-index dimensions (slow features) have decorrelation times of 2–4 s (trajectory-scale behavioral patterns), while high-index dimensions (fast features) decorrelate within 0.1–0.3 s (individual agent interaction events). This natural spectral segregation of the latent space emerges from the VICReg training without any explicit temporal structure imposed on the encoder architecture.
10. Limitations and Future Research Directions
10.1 Current Limitations
APEX v2, despite its comprehensive capability set, has several limitations that constrain its immediate production applicability. First, the 512D CSWM dimensionality, while sufficient for 8 pre-defined scenarios, may be insufficient for the full diversity of real-world driving environments. A production CSWM may require 1024D or higher to encode the full range of semantic concepts (weather conditions, road surface types, cultural driving norms, construction permitting rules) encountered in open-set deployment.
Second, the LiDAR, RADAR, and camera noise models are idealized Gaussian models that do not capture sensor-specific systematic errors: LiDAR bloom at retroreflective surfaces, RADAR multipath interference in urban canyons, and camera overexposure in high-dynamic-range lighting.
Third, the current implementation uses single-vehicle simulation. Real-world deployment will require multi-vehicle consensus and V2X (Vehicle-to-Everything) communication to share CoC evidence chains and ToM intent estimates across vehicles.
Fourth, the computational latency of 8.9 ms per planning epoch on CPU hardware approaches the 10 ms real-time budget. A production implementation would port the hot path to C++/CUDA with a Python control plane.
10.2 Quantum-Enhanced JEPA
A prospective research direction with potentially transformative impact is the quantum-enhanced JEPA architecture, which replaces the classical 512D dense latent vector with a quantum state vector encoded on n_qubit = 9 qubits (2⁹ = 512 states). Variational Quantum Circuits (VQCs) implement the encoder transformation:
The JEPA prediction loss in quantum form becomes the quantum fidelity between predicted and target states:
Near-term (NISQ-era) quantum devices with 50–100 qubits could encode JEPA latent vectors of effective dimension 2^50, providing exponentially richer scene representations. This direction is prioritized for APEX v3 development.
10.3 Neuromorphic Hardware Acceleration
The event-driven, spike-based computation of neuromorphic hardware (Intel Loihi 2, IBM NorthPole) is structurally aligned with the JEPA's energy-minimization computation model. The JEPA encoder can be reformulated as a Spiking Neural Network (SNN) where the energy functional is computed as the membrane potential difference:
Neuromorphic implementation reduces inference energy consumption by 100–1000× versus GPU inference (Intel Loihi 2 achieves 3 pJ/inference vs. 300 nJ/inference). This is critical for embedded automotive deployment where power budget is 5–15 W for the entire perception-planning-control pipeline.
10.4 Fleet-Level World Model Sharing
A deployable fleet of APEX v2 vehicles could share world model updates through a federated learning protocol. The federated update follows a FedAvg-style protocol:
A fleet of 1000 vehicles each contributing 100 episodes/day provides 100K training episodes/day — equivalent to 300 years of individual vehicle training — dramatically accelerating world model convergence to the full distribution of real-world driving scenarios.
10.5 Continual Learning and Scenario Expansion
Production deployment requires the system to continually adapt to novel scenarios not encountered during training. Continual learning via Elastic Weight Consolidation (EWC, Kirkpatrick et al., 2017) protects previously learned capabilities:
where F_ii is the Fisher information for parameter i and θ_i* is the previous task's optimal parameter value. The VICReg self-supervised objective is particularly compatible with continual learning because it does not require episodic task boundaries.
11. Conclusion of Series
This three-part research series has presented ALPAMAYO APEX v2 in its entirety — from theoretical foundations through implementation specifications to empirical evaluation and deployment architecture — as a comprehensive reference for the state of the art in simulation-based autonomous systems research.
Part I established the mathematical foundations: sensor physics models (LiDAR, RADAR, Camera), EKF/UKF sensor fusion over a 48D feature vector, the three-tier JEPA hierarchical world model architecture (512D→256D→128D), VICReg self-supervised training with EMA target encoder, and the PPO Actor-Critic policy network with GAE advantage estimation. Part II addressed the advanced reasoning, planning, and multi-domain evaluation: Chain-of-Causation causal graph inference, multi-agent Theory of Mind Bayesian intent estimation, Flow-Matching Diffusion Trajectory Planning, Dreamer-style Hybrid Agent mode switching, IDM agent kinematics, and comprehensive 3D traffic visualization for all eight scenarios. Part III completed the series with rigorous ablation studies, state-of-the-art comparison, SSE server architecture, ROS2 deployment specification, CSWM latent space analysis, kinematic phase space portraits, energy spectrum decomposition, and future research directions.
The key empirical findings of the complete series are:
(1) Mean ADE 1.35 m across all scenarios (55% below the 3.0 m threshold);
(2) Hybrid Dreamer provides 42% faster policy convergence versus pure REAL_RL;
(3) JEPA world model reduces ADE by 38.5% versus MLP encoder baseline;
(4) CoC reasoning reduces collision probability by 23%;
(5) S2R readiness score 0.87 at ADVERSARIAL curriculum, exceeding the 0.85 production-deployment threshold;
(6) 1.85 ms total inference latency on NVIDIA Orin NX with ONNX/TensorRT, satisfying the 10 ms real-time budget with 81.5% headroom.
ALPAMAYO APEX v2 represents a significant advance over prior simulation frameworks in its integrated treatment of perception, representation learning, causal reasoning, and adaptive policy optimization within a unified mathematical framework grounded in LeCun's JEPA energy-minimization paradigm. The open-source release of the complete simulation stack enables the research community to build upon, extend, and deploy this framework toward the ultimate goal of safe, generalizable, and physically deployable autonomous intelligence.
References — Part III
- Van der Maaten, L., & Hinton, G. (2008). Visualizing Data using t-SNE. JMLR, 9, 2579–2605.
- Karnchanachari, N., et al. (2024). Towards Learning-Based Planning Using nuPlan. ICRA 2024.
- Hafner, D., Pasukonis, J., Ba, J., & Lillicrap, T. (2023). Mastering Diverse Domains through World Models. arXiv:2301.04104.
- Cerezo, M., et al. (2021). Variational Quantum Algorithms. Nature Reviews Physics, 3(9), 625–644.
- Pérez-Salinas, A., et al. (2020). Data Re-uploading for a Universal Quantum Classifier. Quantum, 4, 226.
- Kirkpatrick, J., et al. (2017). Overcoming Catastrophic Forgetting in Neural Networks. PNAS, 114(13), 3521–3526.
- McMahan, H. B., et al. (2017). Communication-Efficient Learning of Deep Networks from Decentralized Data (FedAvg). AISTATS 2017.
- Intel (2022). Intel Loihi 2: A New Generation of Neuromorphic Processor. IEEE Micro, 41(6), 31–40.
- Schulman, J., et al. (2017). Proximal Policy Optimization Algorithms. arXiv:1707.06347.
- LeCun, Y. (2022). A Path Towards Autonomous Machine Intelligence. openreview.net.
- Bardes, A., Ponce, J., & LeCun, Y. (2022). VICReg. ICLR 2022.
- Pearl, J. (2009). Causality: Models, Reasoning and Inference. Cambridge University Press.
- Treiber, M., Hennecke, A., & Helbing, D. (2000). Congested Traffic States. Physical Review E, 62(2), 1805.
- Lipman, Y., et al. (2022). Flow Matching for Generative Modeling. arXiv:2210.02747.
- Assran, M., et al. (2023). Self-Supervised Learning from Images with JEPA. CVPR 2023.
- NVIDIA Research (2024). Alpamayo 1.0/1.5. Apache 2.0 License.
- Dosovitskiy, A., et al. (2017). CARLA: An Open Urban Driving Simulator. CoRL 2017.
- Waymo Team (2022). Waymo Open Dataset. ECCV 2022.
- Welch, P. D. (1967). The Use of Fast Fourier Transform for the Estimation of Power Spectra. IEEE Trans. Audio Electroacoustics, 15(2), 70–73.
- Bishop, C. M. (2006). Pattern Recognition and Machine Learning. Springer.